Ch-2 存储结构层次设计 2
5. Cache 十种进阶优化
5.1 小而简单的一级缓存
原理:较小容量可以支持更快的时钟频率(电信号传输、多选器延迟等因素),降低功耗。
- 采用较低的关联度(如直接映射),使标签检查和数据传输 并行,缩短命中时间。
5.2 缓存路预测
原理:在保持高关联度的同时,减少冲突缺失并缩短命中时间。
- 为每个缓存块添加 块预测位 (block predictor bits),预测下一次访问的“路”。预测命中则仅执行一次标签比较;失败则在下一周期检查其他块。
5.3 流水线与缓存划分
原理:提高缓存带宽,减少访问缓存过程中器件的空闲时长。
- 类比于 CPU 流水线,将缓存访问过程划分为多个 流水级,虽然增加了单次访问的延迟 (latency),但极大地提升了指令吞吐量;
- 将缓存分为多个 独立的存储体 (bank) ,支持同时被访问,通过顺序交错 (Sequential Interleaving) 的地址映射方式,将连续的块地址轮流分到各个存储体中。

5.4 非阻塞缓存
原理:在发生缓存缺失时,允许处理器继续为后续的命中请求提供服务,而不必停顿。
对非阻塞缓存的支持程度包含以下几类:
- Hit under miss: 一个未命中发生时,后续的 命中 请求可以正常完成;
- Miss under miss: 多个未命中可以 并发处理(第二个未命中可在第一个完成前发出);
- Hit under multiple misses: 多个未命中并发进行时,仍能处理新的命中请求。
- 内存访问延迟可能达到数百个周期,如果只处理一个未命中,当程序存在多个缓存缺失时,后续的未命中必须等待前一个完成才能发出请求,无法利用内存的并行性,支持miss under miss 可以让处理器同时发出多个内存请求,并行处理隐藏延迟;
- 支持并发未命中的数量 并不是越多越好,每个未命中的状态都需要独立的存储、缺失状态保持寄存器等硬件,条目越多,硬件成本与复杂度越高,资源冲突可能性也越大。
5.5 关键字优先与早重启
原理:针对大缓存块,不需要等待这个块加载完毕,优先满足处理器的字需求。
- 关键字优先 (Critical Word First):优先请求缺失的字,一旦到达立即送往处理器,处理器在执行的同时填充大缓存块的剩余部分;
- 尽早重启动 (Early Restart):按照正常顺序传输大缓冲块,但目标字一旦到达就送往处理器执行,同时按顺序继续传输剩余部分。
5.6 合并写缓冲区
原理: 将同一缓存行内的连续写操作合并,减少对下级存储器的写操作次数。
- 检查写缓冲区 (write buffer) 中已有的地址,如果新写入的数据地址与已有条目 连续,则将其合并为单个物理条目(中间不能有空洞),以减少写操作次数。
Example
假设写缓冲每个条目可以存放一个 64 字节的缓存行,且支持部分写入,CPU 依次执行以下写操作(地址按照字节寻址):
- 写入地址 0x1000,4 字节数据 A;
- 写入地址 0x1004,4 字节数据 B;
- 写入地址 0x1008,4 字节数据 C;
- 如果写缓冲区 不支持合并,那么三个写操作会占用三个独立的条目,最终需要向下级存储发出三次写入请求(即使它们可能属于同一个缓存行)。
- 如果 支持合并,则有效范围最终扩展为 0x1000~0x100B。只有一个条目被发送到下级存储,合并为一次写操作。
实际硬件设计会根据以下规则判断是否可以合并:
- 地址对齐:通常以缓存行为边界。合并只允许在同一个缓存行内进行。
- 连续性:新写入的地址与已有条目的地址范围必须恰好连续(即首尾相接),不能有空洞。有些设计也允许重叠,这时需要更新已有数据;
- 掩码支持:每个条目通常带有一个 字节掩码(byte mask),用于标记哪些字节是有效数据。合并时只需更新掩码和数据部分,无需移动其他数据。
5.7 编译器优化
- 循环交换 (Loop Interchange): 改变嵌套循环顺序,使访问模式符合数据在内存中的存储顺序,提升空间局部性;
// Program 1
// 相邻的 a[i][j] 和 a[i+1][j] 相距 1024 个整数,空间局部性极差
for(int j=0;j<1024;j++)
for(int i=0;i<1024;i++)
sum+=a[i][j];
// Program 2
// 每次缺失载入的后 15 个整数均 hit,缺失率降到原来的约 1/16
for(int i=0;i<1024;i++)
for(int j=0;j<1024;j++)
sum+=a[i][j];- 分块 (Blocking): 将大型矩阵运算划分为较小的子块 (sub-blocks),确保子块能完全装入缓存,提升时间局部性。
// Program 1
// 由于矩阵规模远超缓存容量,导致数据在重用前被频繁替换,时间局部性极差
// 当计算 c[i][j+1] 时,之前为 c[i][j] 加载的 b 列数据可能已经被替换
for(int i=0;i<N;i++)
for(int j=0;j<N;j++)
for(int k=0;k<N;k++)
c[i][j]+=a[i][k]*b[k][j];
// Program 2
// 限制访问范围确保子块驻留在缓存中,提升时间局部性,数据重用率提升约 B 倍
// 处理方块时 B*B 块大小小于缓存容量,a 和 b 的数据会驻留在缓存中
// 若 B 太小则无法充分利用缓存空间,理想的 B 应使 a,b,c 块综合略小于缓存有效容量
for(int j_st=0;j_st<N;j_st+=B)
for(int k_st=0;k_st<N;k_st+=B)
{
int j_ed=std::min(j_st+B,N);
int k_ed=std::min(k_st+B,N);
for(int i=0;i<N;i++)
{
for(int j=j_st;j<j_ed;j++)
{
int tmp=0;
for(int k=k_st;k<k_ed;k++)
tmp+=a[i][k]*b[k][j];
c[i][j]+=tmp;
}
}
}Note
软件优化的优势: 编译器优化不需要任何硬件改动,通过纯软件手段就能显著降低缺失率 (miss rate),是现代高性能计算的核心。
5.8 硬件预取
原理:硬件根据访问模式预测未来需要的数据,提前将其加载到缓存或指令流缓冲区 (instruction stream buffer)。
- 发生未命中时取回两个块,将请求的块放入缓存,下一个连续的块放入指令流缓冲区。
- 如果请求的块已经在流缓冲区中,则取消原本的缓存请求,然后从流缓冲区读取该块并发出下一个预取请求。
5.9 编译器预取
原理:编译器在代码中显式插入 预取指令 (prefetch instructions)。
- 分为 寄存器预取 和 缓存预取。将预取操作的时间与流水线执行重叠,有效隐藏缺失惩罚。
// 16-byte blocks, 8-byte elements for a and b, write back
// Program 1 251 misses
// a 每相邻两次发生一次 miss,一共发生了 3*(100/2) = 150 misses
// b 从 0 至 100 各发生一次 miss,一共发生了 101 misses
for(int i=0;i<3;i++)
for(int j=0;j<100;j++)
a[i][j]=b[j][0]+b[j+1][0];
// Program 2 19 misses
// a 是 4 misses 因为在预取的时,相邻的两次有一次 hit
// b 是 7 misses 因为在预取的时,列相距远全部 miss
// 预取指令 prefetch(+7) 意味着处理器尝试提前加载 7 轮之后才用得到的数据
for(int j=0;j<100;j++)
{
prefetch(b[j+7][0]); // b[0][0]~b[6][0] 7 misses
prefetch(a[0][j+7]); // a[0][0]~a[0][6] 4 misses
a[0][j]=b[j][0]*b[j+1][0];
}
for(int i=1;i<3;i++)
for(int j=0;j<100;j++)
{
prefetch(a[i][j+7]); // a[1][0]~a[1][6] 4 misses
a[i][j]=b[j][0]*b[j+1][0]; // a[2][0]~a[2][6] 4 misses
}5.10 HBM 优化
原理:利用高带宽内存 (High Bandwidth Memory, HBM) 作为巨大的 L4 缓存。
传统 HBM 的访存过程一个简单表述为:
- 行激活 (ACT):根据地址打开 HBM 内部的一个数据行,搬运几 KB 数据到行缓冲区;
- 列寻址 (CAS):在缓冲区中定位到 Tag 所在的列并读出;
- 比对与传输:CPU 比对 Tag,若 Hit,则发起第二次列寻址读出 Data,若 Data 不在已经激活的数据行中,则需要再激活其所在的数据行;
- 突发传输 (Burst):数据通过 1024-bit 位宽的总线高速传回 CPU;
- 预充电 (PRE):关闭当前行,准备下次访问。
由于 L4 容量巨大,会导致标签 (tags) 数据量极其庞大,通常需要两次 DRAM 访问(一次查标签进行地址翻译,一次 Hit 后查数据) ,针对此问题有以下优化策略:
- 将标签和数据放在 DRAM 的同一行 (same row) 中,不需要再激活 row buffer;
- 采用 合金缓存 (Alloy cache) :将标签和数据结构性地融合在一起(直接映射结构),Hit 直接读数据以加快访问速度,使得只需单次 HBM 周期就能进行突发传输 (burst transfer) 同时获取标签和数据;
- 使用映射表 (map) 或访存预测器 (memory access predictor) 加快未命中检测速度。
6. 虚拟内存技术
6.1 引入动机
- 连续分配导致效率低下:早期系统采用连续分配和直接内存访问,一个程序必须作为一个整体、连续地塞进物理内存中。这不仅导致大程序很难找到足够大的连续空间,还会随着程序的频繁加载和卸载,在内存中留下大量无法利用的内存碎片,严重浪费资源。
- 缺乏隔离带来安全隐患:不同进程直接操作物理内存地址。如果 Process A 出现代码错误或恶意行为,它可能会越界读取甚至篡改 Process B 的内存数据。这种缺乏保护的机制导致系统极不稳定。
6.2 四个任务
- 多处理器模式:至少提供两种处理器模式(用户模式和操作系统/内核模式)。这种区分在硬件层面建立了防护围墙,防止应用程序非法篡改系统配置或干预其他进程的运行。
- 用户模式 用于运行普通程序,其访问硬件和执行敏感指令的权限受限;
- 内核模式 则供操作系统管理系统资源,如读写页表和控制中断。
- 不可写状态机制:提供一部分用户进程可用但不可写的处理器状态机制。处理器中包含一些定义系统行为的关键状态寄存器,例如页表基址寄存器(PTBR),如果用户能随意修改映射规则,就能将虚拟地址指向任意物理内存位置,从而使所有安全限制失效。因此,这些核心配置只能由处于特权模式的操作系统进行修改;
- 模式切换机制:提供从用户模式切换到特权模式(如通过系统调用)及反向切换的机制。这种机制类似于一个受监控的闸口,确保用户进程只能在特定的、可预测的入口点请求操作系统服务,严禁恶意代码绕过验证直接跳转到内核的敏感执行区域;
- 内存保护限制:提供限制内存访问的机制,以便在不把进程交换到磁盘的情况下保护进程的内存状态。这通常通过在页表项中设置 访问控制位(如读/写/执行权限)来实现。当进程尝试访问未授权的物理页或违反权限操作时,硬件会自动触发异常拦截。
7. 虚拟机技术
7.1 引入动机
- 安全性与可靠性:现代操作系统的代码量及其庞大且逻辑复杂, 导致其固有的安全漏洞(如内核漏洞)难以完全根除。一旦操作系统被攻破,运行其上的所有程序都将暴露。虚拟机监视器在底层构建更小更易于防御的软件层,可以为系统提供更高级别的隔离保护;
- 云计算与资源共享:在数据中心或云服务中,多个互不信任的用户需要共享同一台高性能服务器。虚拟机技术允许每位用户运行独立的操作系统镜像,确保即便某位用户的系统崩溃或受损,也不会影响同一物理机上的其他租户;
- 性能开销的可接受性:过去虚拟化因软件模拟硬件而导致严重的性能损失。随着现代处理器主频的飙升、多核架构的普及以及硬件辅助虚拟化技术的出现,这种性能损耗已大幅降至可忽略不计的程度,使得虚拟化在大规模部署中变得经济高效。
7.2 核心特性
单台物理计算机可以运行多个 虚拟机 (VM),支持多个不同的操作系统同时共享底层硬件资源。虚拟机监视器 (VMM/Hypervisor) 负责支持虚拟机的运行。
VMM必须具备三个基本特征:1、为程序提供与原硬件基本一致的环境;2、保证程序运行速度仅有轻微下降;3、完全控制所有系统资源。
7.3 软硬件要求
- 从 定性要求 (Qualitative Req) 来看,客户软件在虚拟机上的行为应与其在原生硬件上 完全一致,且不能直接更改系统资源的分配。
- 从 特权要求 (Privilege Req) 来看,处理器必须至少支持系统和用户两种模式。存在一个特权指令子集,只能在系统模式下执行,且所有系统资源必须仅能通过这些特权指令来控制。
7.4 ARM Cortex-A53
- 硬核:已经完成物理布局布线、针对特定芯片代工厂深度优化的设计。它就像一个无法修改内部电路的“黑盒”,使用者只能连接其外部接口并调整少量外部参数(如外接缓存大小)。虽然毫无修改余地,但它能提供极致的高性能和最小的芯片面积。
- 软核:软核通常以代码或标准逻辑元件库的形式交付,尚未绑定具体的物理制造工艺。具有极高的灵活性和可移植性,不仅能自由更换不同的芯片代工厂进行生产,还允许使用者修改其内部逻辑。不过,这种灵活性通常以牺牲部分极致性能和增加芯片面积为代价。
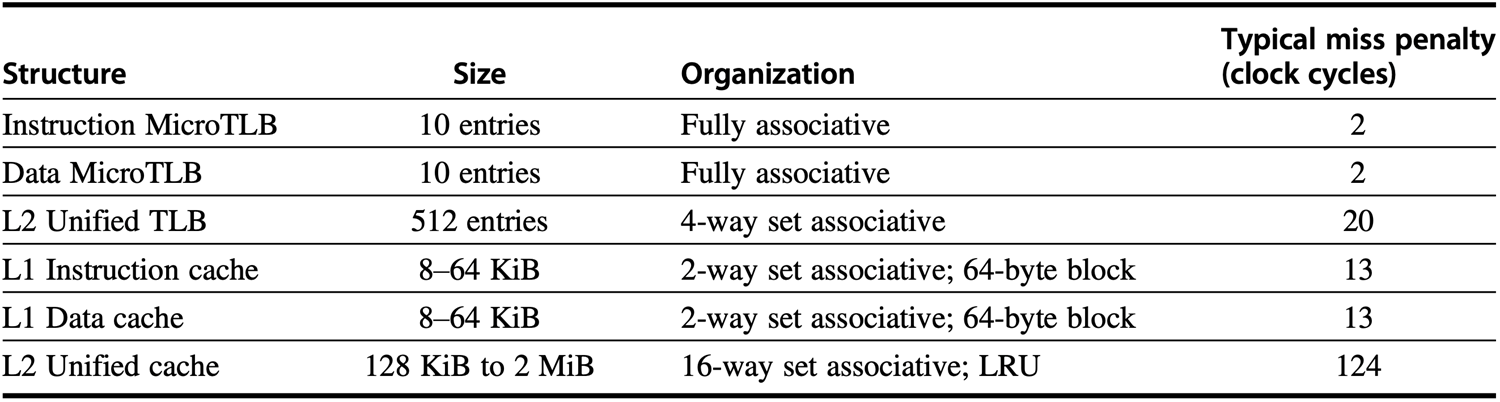
处理器的经典设计:L1 指令 / 数据 Cache 分离 (Harvard架构):现代 CPU 的 L1 Cache 普遍使用分离式设计:
- L1 指令 Cache (L1 I-Cache):专门存指令,大小为 32KB;
- L2 指令 Cache (L2 D-Cache):专门存数据,大小为 32 KB;
- 两者是完全独立的硬件,各自有自己的
tag,index和offset划分,不能混用。
在数据访问路径里计算的是 数据 Cache 自己的 32 KB ,而不是 L1 Cache 总体的 64 KB。
7.5 Intel Core i7-6700
指令 Cache 和数据 Cache 的差异:
- 指令 Cache:所有程序的指令缺失率都远低于数据 Cache,且随着 Cache 扩容下降更快,最终趋近于零,因为指令的局部性天然优于数据;
- 数据 Cache:不同程序的缺失率差距极大,是 Cache 性能的核心瓶颈。