Ch-3 指令级并行及应用 2
1. 分支预测
1.1 动态预测
动态分支预测 (Dynamic Branch Prediction) 根据程序运行时的历史行为预测下一次分支方向。相比静态预测,它不把所有分支都视为同一种模式,而是为不同分支保存历史状态。
动态预测通常由两类结构配合完成:
- BTB (Branch Target Buffer):缓存分支指令的目标地址,用于预测跳转目标;
- BHT (Branch History Table):记录分支历史方向,用于预测是否跳转。
当 PC 命中 BTB,且方向预测器给出 taken 时,下一条取指地址来自 BTB 中的目标地址;否则继续按 PC+4 顺序取指。
动态预测的关键并不是“预测一定正确”,而是让处理器在分支结果真正算出之前先保持取指流水线不断流。对于深流水线或宽发射处理器而言,分支停顿会同时浪费多个周期、多个取指槽和多个执行槽,因此即使预测偶尔错误,只要总体准确率足够高,仍然能显著提高吞吐量。
需要注意的是,BHT 负责方向,BTB 负责目标地址。BHT 通常只用 PC 低位索引方向计数器,多个分支可能共享同一项;BTB 则保存 tag+target,必须确认 tag 匹配当前 PC。因此,BHT 可能给出 taken 倾向,但 BTB 没有当前分支的有效 target。此时前端不能凭空跳转,只能按 PC+4 继续取指,或等待后续流水级解析出真实目标地址。
1.2 位预测器
1-bit predictor 也称 last-time predictor,每个分支只保存 1 位状态:
1表示上次 taken,本次预测 taken;0表示上次 not taken,本次预测 not taken。
这种方法实现简单,但状态变化过于敏感。只要一次预测失败,下一次预测方向就会立即翻转。
1-bit 局限
对循环分支 T T T T T T T T T N,若初始预测为 not taken,则第一次进入循环和最后一次退出循环都会错,准确率为 \(8/10=80\%\)。但对 T N T N ... 这种交替模式,1-bit 预测器会每次都被上一次结果带偏,准确率可能降为 \(0\%\)。
2-bit predictor 为每个分支保存 2 位饱和计数器,只有连续两次反向结果才会改变强预测方向。四个状态可以按“强/弱”和“跳转/不跳转”理解:
| 状态 | 预测方向 | 遇到 taken | 遇到 not taken |
|---|---|---|---|
11 Strong Taken | taken | 留在 11 | 降到 10 |
10 Weak Taken | taken | 升到 11 | 降到 01 |
01 Weak Untaken | not taken | 升到 10 | 降到 00 |
00 Strong Untaken | not taken | 升到 01 | 留在 00 |
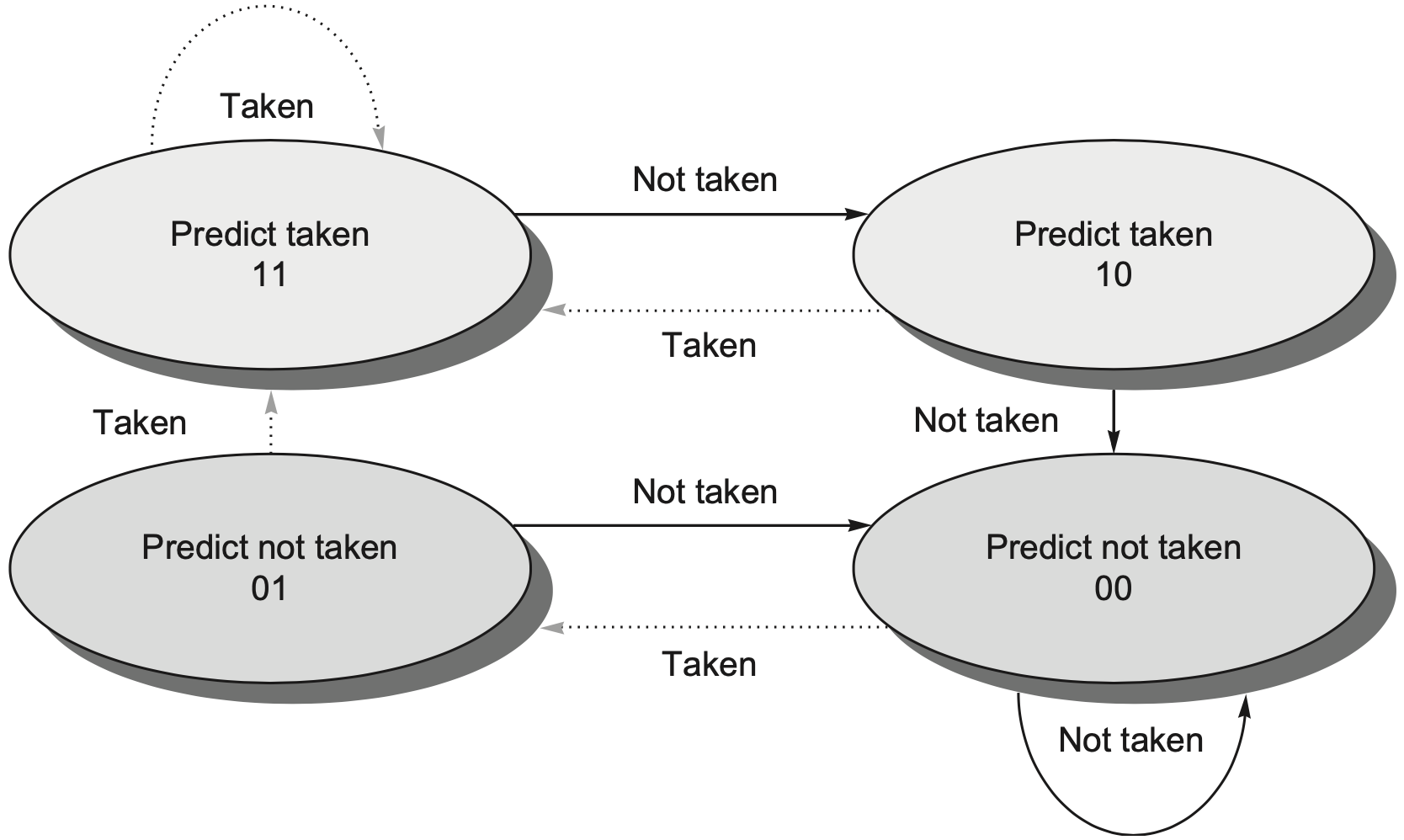
2-bit 预测器的核心思想是 滞后翻转:一次偶然的反向结果只会把状态从 strong 推到 weak,而不会立刻改变预测方向。因此它对循环末尾的单次 not taken 更稳定。
例如循环分支大部分时间 taken,只有退出循环时 not taken。1-bit 预测器会在退出时被改成 not taken,下一次重新进入循环时又会错一次;2-bit 预测器在退出时通常只是从 Strong Taken 降到 Weak Taken,下次进入循环仍预测 taken,因此少错一次。
更一般地,N-bit predictor 使用范围为 \(0\sim 2^N-1\) 的饱和计数器:
- 计数器高于或等于中点时预测 taken;
- 计数器低于中点时预测 not taken;
- taken 时计数器加一,not taken 时计数器减一,达到边界后饱和。
PPT 中给出过一个经验结果:4096 项 2-bit predictor 在整数程序上的误预测率约为 11%,在浮点程序上约为 4%。这也说明分支预测效果和程序类型关系很大,整数程序通常包含更多复杂控制流,而浮点程序往往循环结构更规则。
1.3 局部历史
局部预测器 (Local Predictor) 认为某个分支的结果可以由它自己过去几次结果预测。每条分支维护一个 局部历史寄存器 (local history register),再用该历史索引一组 2-bit 计数器。
其结构可以理解为两级:
- 用分支 PC 找到这条分支自己的历史;
- 用这段历史选择对应的饱和计数器,得到 taken / not taken 预测。
局部预测适合具有固定周期模式的单个分支。它的核心不是只记录“上一次跳没跳”,而是为每条分支保存一段 局部历史 (local history),再用这段历史去选择对应的方向计数器。
假设 1-bit local history 初始为 0,两个历史状态对应的 2-bit counter 都初始为 Strong Not Taken,分支模式为 (NNT)*。由于 1-bit history 只能表示上一次是 N或上一次是 T,但在 (NNT)* 中,N 后面有时接 N,有时接 T,因此这个历史长度不够表达完整周期。按 PPT 的例题,100 轮中会产生 100 次误预测。
若希望更好地预测 (NNT)*,需要把 local history 加长。比如 2-bit local history 可以区分 NN、NT、TN 等上下文,从而把“当前处在周期的哪个位置”编码进预测索引。
1.4 全局相关
相关预测 (Correlating Prediction) 认为一个分支的结果可能依赖于其他分支的结果,即“没有一个分支是孤岛”。例如:
if(d==0) d=1;
if(d==1) ...第二个分支是否成立,与第一个分支的结果强相关。若只看第二个分支自己的历史,预测器可能看不到这种跨分支关系。
两级预测器 (Two-Level Predictor) 使用最近 \(m\) 个分支的全局历史,从 \(2^m\) 组预测器中选择一组,每组包含 \(n\) 位预测计数器 (常用 2-bit predictor)。常记为 \((m,n)\) predictor:
- \(m\):使用最近多少个分支结果作为全局历史;
- \(n\):每个预测计数器的位数;
- 全局历史用于选择预测表项,计数器用于给出最终方向。
这种预测器的优势在于能表达 路径上下文。同一条分支在不同路径下可能有不同方向,单独看它自己的历史会混在一起,而全局历史能把“从哪条路径走到这里”编码进索引中。但全局历史越长,表项数和别名冲突问题也越明显。
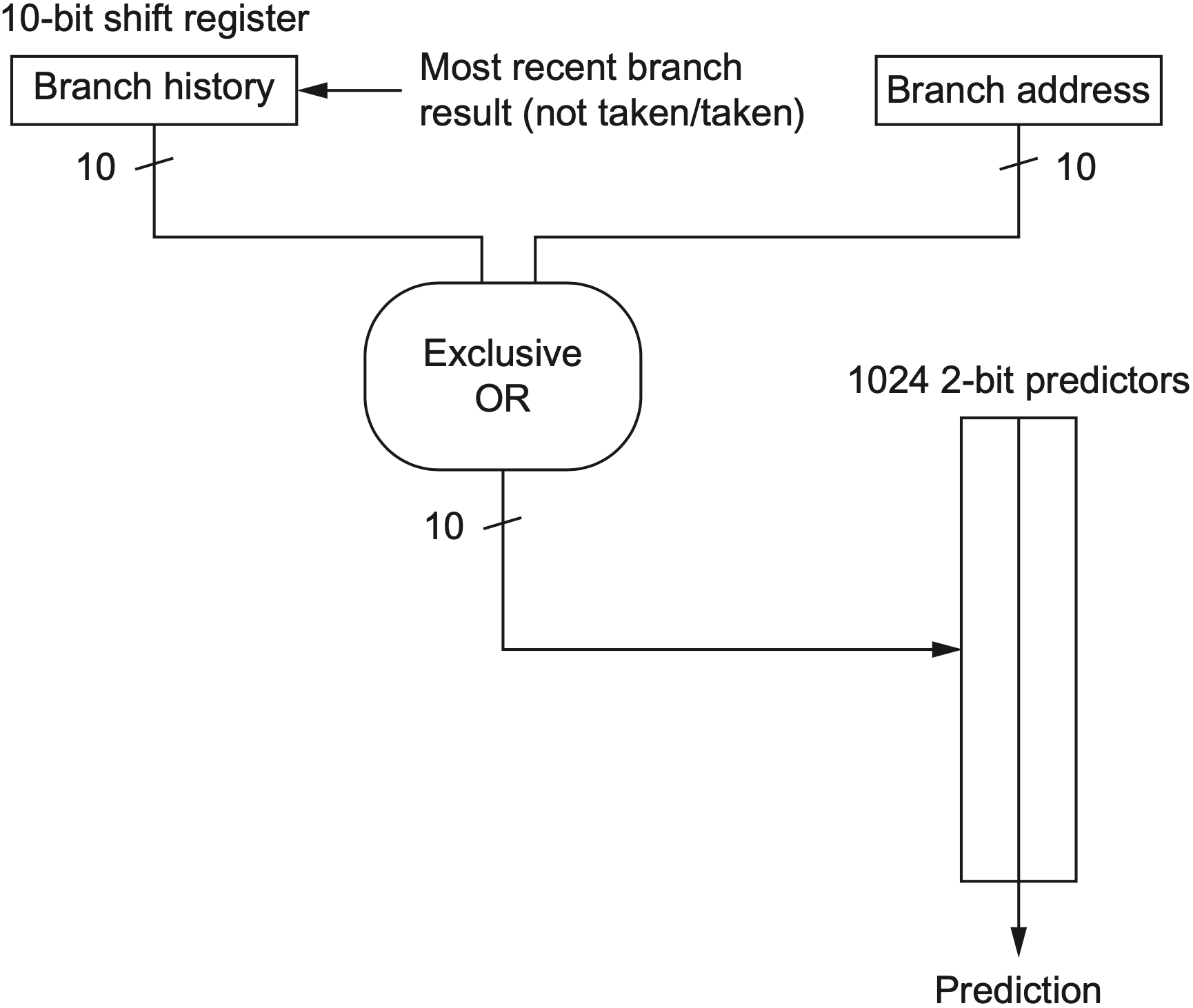
gshare:将全局历史与 PC 做哈希,减少不同分支映射到同一表项的冲突,它并不增加预测表容量,而是用改变表项映射方式。若不同分支出现在不同路径历史下,异或后可能被分散到不同计数器,从而减少有害别名;但它不能消除冲突,也不保证总是优于单纯 PC 索引。
对于一个独立的 pattern history table (PHT),\((m,n)\) predictor 的存储开销为 \(2^m\times n\) bit。\(m\) 每增加 1,表项数就翻倍,因此全局历史并不是越长越好;过长历史会带来更多容量开销,也会让不同路径哈希到同一项的冲突更难控制。
1.5 混合预测
不同分支的行为模式不同,没有一种预测器适合所有分支。混合预测器 (Hybrid Predictor) 同时维护多种预测器,并用选择器决定采用哪一个结果。
锦标赛预测器 (tournament predictor):同时使用局部预测器和全局预测器,再由 selector 根据历史表现选择更可靠的一方。
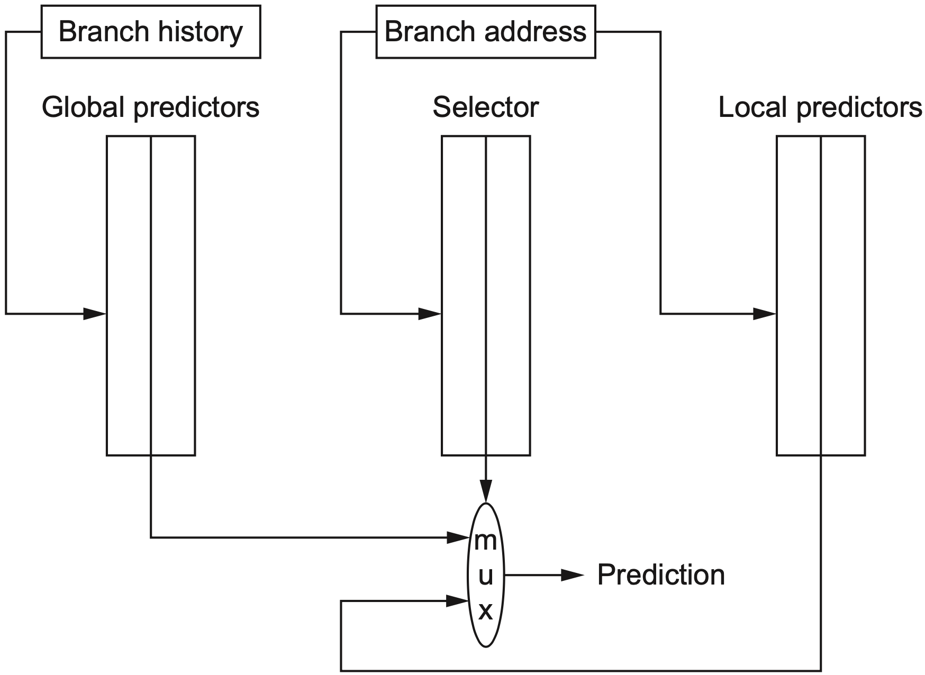
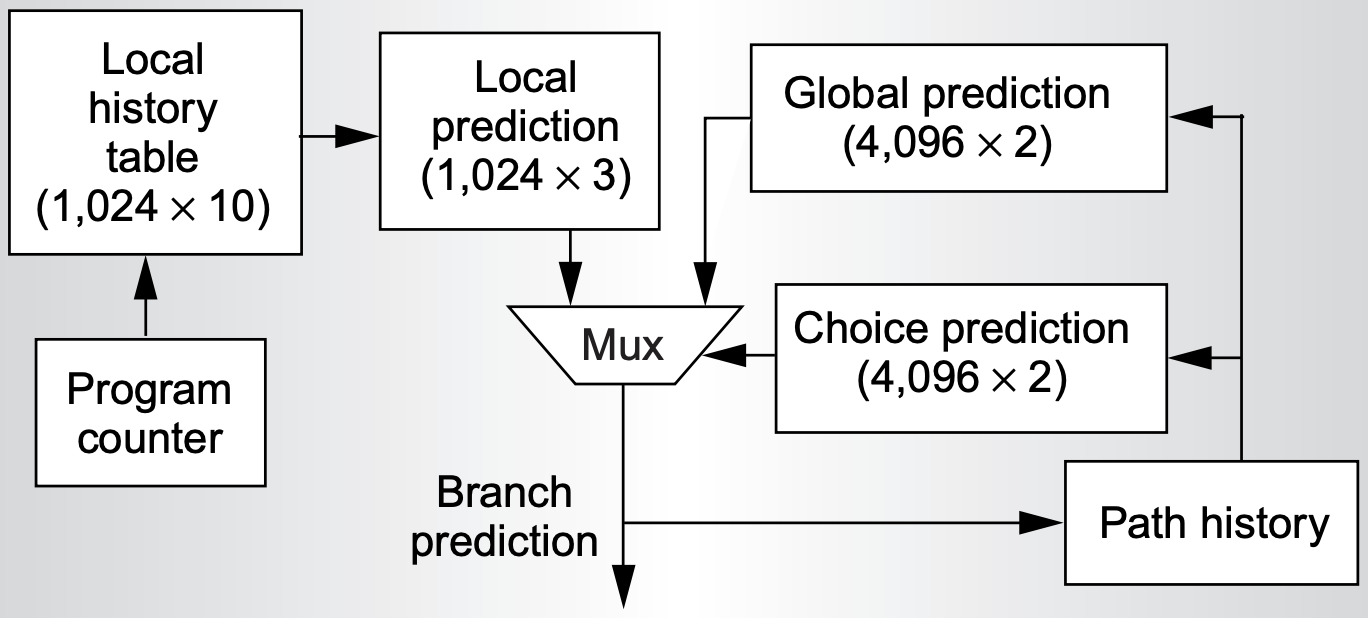
选择器本质上也是一个饱和计数器:当局部预测正确而全局预测错误时,选择器向局部预测器倾斜;反之则向全局预测器倾斜。
混合预测的意义在于把“选择预测器”也变成一个可学习的问题。局部预测器擅长处理单个分支的周期模式,全局预测器擅长处理跨分支相关,selector 则根据每条路径上的历史表现决定相信谁。这种结构牺牲了更多存储和访问能耗,但能显著降低难预测分支的错误率。
1.6 TAGE
TAGE (Tagged Geometric History Length Predictor) 使用多张全局历史长度不同的预测表。短历史表覆盖简单、稳定的分支,长历史表捕捉更远距离的相关性。

TAGE 的关键机制包括:
- 每张表使用不同长度的全局历史,且历史长度通常按几何级数增长;
- 每个表项带 tag,用于降低别名冲突;
- 预测时优先采用 最长历史且 tag 命中 的表项;
- AGE / useful 位用于替换价值较低的表项。
TAGE 的优势在于能够同时覆盖短周期分支和长距离相关分支,因此在现代高性能处理器中很常见。
从直觉上看,TAGE 相当于同时问多个观察窗口:“只看最近几个分支够不够?要不要看更长的历史?”如果长历史表命中且可信,说明这条分支确实受远距离路径影响;如果长历史表不命中,就退回较短历史表,避免用噪声历史干扰简单分支。
PPT 中也给出了性能直觉:如果分支频率约为 20% 到 25%,TAGE 一类预测器把误预测率压到约 1.8% 到 2.2% 时,整体性能影响大约落在 2.7% 到 3.4% 范围。误预测率已经很低时,继续优化预测器仍然有价值,但收益会受到分支频率和错误恢复代价共同限制。
2. 动态调度
2.1 核心目标
动态调度 (Dynamic Scheduling) 让硬件在运行时重排指令执行顺序,以减少数据冒险造成的停顿,同时仍然保持程序的数据流和异常行为正确。
在静态调度中,编译器提前安排指令顺序;在动态调度中,硬件可以在发现前一条指令等待数据时,让后续无关指令先执行。
典型做法是将 ID 阶段拆成两段:
- Issue:按程序顺序发射指令,检查结构资源;
- Read operands:当操作数就绪时读取操作数并进入执行,可以乱序发生。
因此动态调度通常具有:
- 顺序发射 (in-order issue);
- 乱序执行 (out-of-order execution);
- 乱序完成 (out-of-order completion)。
动态调度的前提是:程序顺序不等于执行顺序。只要不破坏数据依赖、名字依赖和控制依赖,硬件就可以让后面的无关指令越过正在等待的指令。典型场景是长延迟的 fdiv.d 阻塞了紧随其后的 fadd.d,但再后面的 fsub.d 与它们无关,此时动态调度允许 fsub.d 先进入执行单元。
这类机制的代价是硬件必须保存更多“半执行状态”:哪些指令已经发射、哪些操作数还没到、结果将写到哪里、发生异常时如何恢复。后面的记分牌、Tomasulo 和 ROB,都是围绕这些状态设计的。
在没有硬件推测的动态调度中,分支仍然是一个边界:位于某条分支之后的指令,通常不能在这条分支真正完成之前进入执行。也就是说,动态调度可以绕过数据等待,但还没有完全跨越未解析的控制依赖;真正把分支预测路径上的指令提前执行,需要后面的硬件推测机制。
2.2 记分牌
记分牌 (Scoreboarding) 是一种集中式动态调度方法。它由一个全局控制表记录功能单元、寄存器结果和每条指令所处阶段,从而决定指令是否可以继续前进。
记分牌将指令推进分为四步:
- Issue:如果功能单元空闲,且不存在 WAW 冒险,则发射;
- Read operands:若源操作数已经可读,则读取;否则等待 RAW 消除;
- Execution complete:功能单元完成运算;
- Write result:若不会破坏 WAR 顺序,则写回结果。
记分牌的核心是:不通过编译器提前安排,而是由硬件持续观察哪些操作数已经可用、哪些功能单元被占用。
它的控制方式比较保守:指令能否进入下一阶段由记分牌统一判断,所有功能单元都向记分牌报告状态。因此记分牌更像“中央调度表”,能够清楚地避免结构冲突和数据冲突,但每一次判断都依赖全局状态,扩展到更宽的发射宽度时会变得复杂。
2.3 状态表
记分牌维护三类状态。
Instruction Status 记录每条指令处于哪个阶段:Issue、Read operands、Execution complete、Write result。
Functional Unit Status 记录每个功能单元的使用情况,典型字段如下:
| 字段 | 含义 |
|---|---|
Busy | 该功能单元是否正在使用 |
Op | 当前执行的操作类型 |
Fi | 目的寄存器 |
Fj/Fk | 两个源寄存器 |
Qj/Qk | 将产生源操作数的功能单元 |
Rj/Rk | 源操作数是否已经可读 |
Register Result Status 记录每个寄存器将由哪个功能单元写入。如果为空,表示当前没有未完成指令会写该寄存器。这个表主要用于检测 WAW 和 RAW:如果某个寄存器已经登记了未来写入者,那么新的同目的寄存器指令不能随意发射,读取该寄存器的指令也需要等待对应功能单元产生结果。
2.4 冒险处理
记分牌对三类数据冒险的处理方式不同:
- RAW:在 Read operands 阶段等待,直到产生源操作数的功能单元写回或结果可转发;
- WAW:在 Issue 阶段阻止发射,避免两个未完成指令写同一目的寄存器;
- WAR:在 Write result 阶段等待,直到更早的指令已经读取该寄存器。
记分牌能够支持乱序执行,但它并没有真正消除 WAR / WAW,只是通过暂停来避免错误。因此它的控制逻辑较直观,但并行度会受到名字依赖限制。
例如一条较早的指令还没读取 F6,而后面一条较晚的指令准备写 F6,此时若允许后者先写回,就会破坏前者应该读到的旧值,这就是 WAR。记分牌没有为 F6 创建新名字,只能让后写指令停在 Write result 阶段,直到旧读完成。
记分牌限制
Scoreboard 可以让无关指令绕过正在等待的指令,但如果遇到 WAR 或 WAW,它仍然需要停顿。真正把名字依赖变成可并行执行机会的,是 Tomasulo 中基于 tag 的寄存器重命名。
3. Tomasulo
3.1 基本结构
Tomasulo 算法 是一种分布式动态调度方法。它不把所有控制都集中在一个记分牌中,而是让功能单元附近的 保留站 (Reservation Station) 保存等待执行的操作。
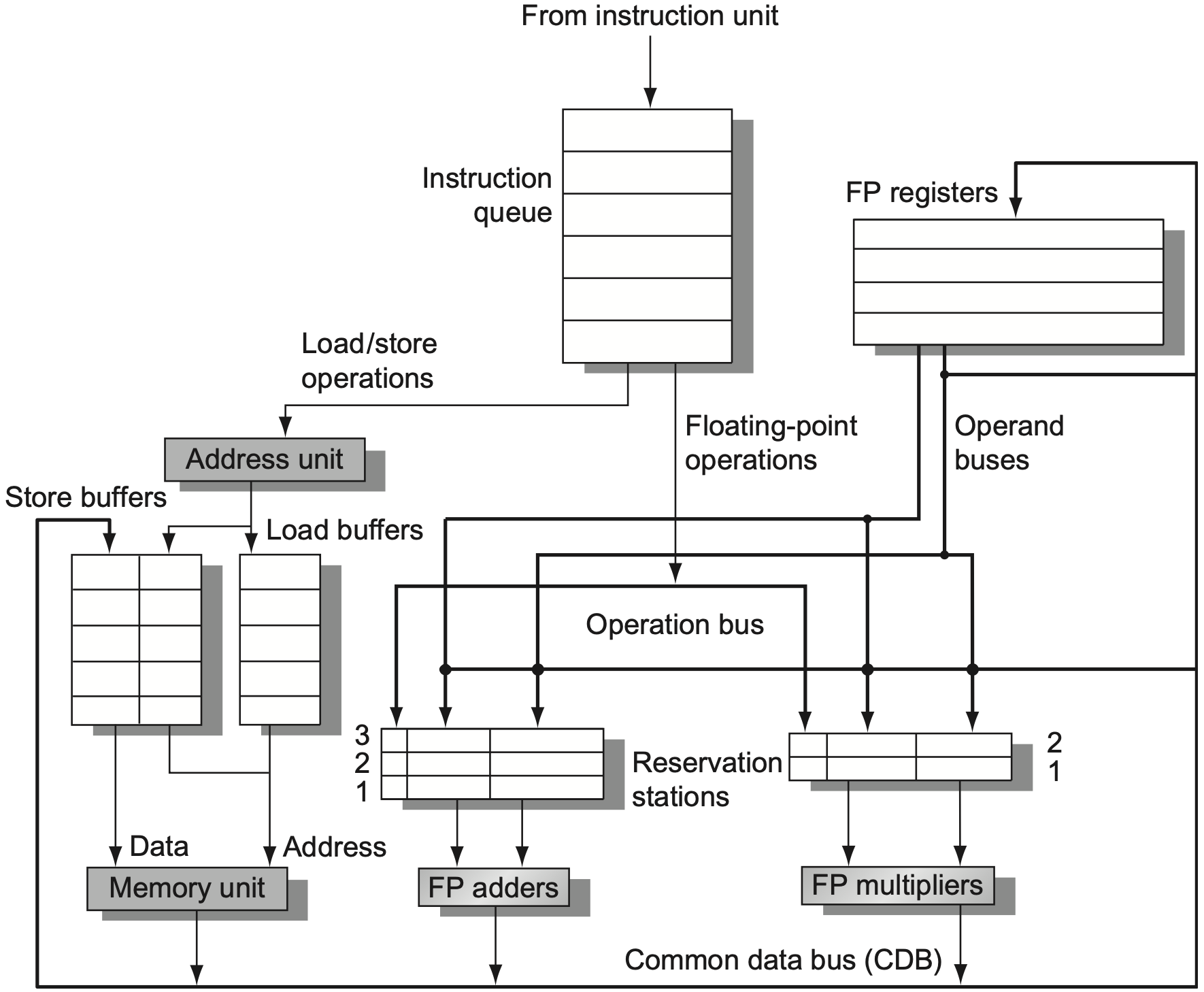
核心组件包括:
- Instruction Queue:保存按顺序取来的指令;
- Load / Store Buffers:保存访存指令的地址与数据状态;
- Reservation Stations:保存浮点加法、乘法等操作的操作码、操作数或等待标签;
- CDB (Common Data Bus):广播执行结果,同时唤醒等待该结果的保留站和寄存器。
Tomasulo 相比记分牌有两个重要优势:
- 分布式等待:每个保留站自己记录操作数是否就绪;
- 寄存器重命名:用保留站编号或 ROB 编号代替寄存器名,消除 WAR 和 WAW。
在 Tomasulo 中,寄存器名不再是唯一的等待对象。指令发射后,如果源操作数还没有产生,保留站记录的不是“等待某个寄存器”,而是“等待某个生产者 tag”。当生产者把结果广播到 CDB 上,所有等待该 tag 的保留站会同时捕获结果。这种广播机制让多个依赖者可以在同一周期被唤醒。
3.2 保留站
保留站状态字段如下:
| 字段 | 含义 |
|---|---|
Busy | 当前保留站是否被占用 |
Op | 要执行的操作 |
Vj/Vk | 已经可用的源操作数值 |
Qj/Qk | 将产生源操作数的保留站编号 |
A | load/store 的地址计算信息 |
若 Qj/Qk 为空,说明对应操作数已经可用,保存在 Vj/Vk 中;若不为空,说明该操作数还在等待某个保留站或缓冲区通过 CDB 广播结果。
因此,V 字段和 Q 字段不会同时表达同一件事:V 保存“值已经到了”,Q 保存“值还没到,但知道该等谁”。这也是 Tomasulo 能够自然处理 RAW 的原因,消费者不需要反复查询寄存器文件,只要监听 CDB 上是否出现自己等待的 tag。
3.3 重命名
Tomasulo 使用 tag 来实现隐式寄存器重命名。寄存器文件不只保存值,还保存 Qi 字段:
Qi=0:该寄存器当前值可直接读取;Qi!=0:该寄存器的最新值将由某个保留站产生。
例如下面的代码同时包含 RAW、WAR 和 WAW:
fdiv.d f0, f2, f4
fadd.d f6, f0, f8
fsd f6, 0(x1)
fsub.d f8, f10, f14
fmul.d f6, f10, f8fadd.d对fdiv.d有 RAW,因为它要读f0;fsub.d写f8,而前面的fadd.d还要读旧f8,存在 WAR;fadd.d和fmul.d都写f6,存在 WAW。
Tomasulo 不需要真的修改程序中的寄存器名,而是在硬件内部把不同“版本”的 f6、f8 绑定到不同 tag。这样后续指令等待的是 tag,而不是寄存器名本身。
这里的“重命名”并不是修改汇编代码,而是修改硬件内部的映射关系。假设前一条指令将写 f6,后一条指令也将写 f6,Tomasulo 可以让它们分别对应不同保留站。谁最后更新体系结构可见的 f6,由寄存器结果状态中的最新 tag 决定。旧 tag 即使较晚广播,也不会覆盖新映射。
3.4 执行流程
Tomasulo 的基本流程分为三步。
Issue / Dispatch:从指令队列头部取出下一条指令。如果有空闲保留站或缓冲区,就分配给它;若源操作数已在寄存器中,直接填入
Vj/Vk;若源操作数尚未就绪,则记录产生者 tag 到Qj/Qk。Execute:当所有源操作数可用,且功能单元空闲时开始执行。对于 load/store,先计算有效地址,再根据访存约束决定何时访问内存。
Write Result:执行完成后将结果放到 CDB 上广播。所有等待该 tag 的保留站都会捕获结果,寄存器文件中仍指向该 tag 的项也会更新。
对于 load/store buffer,除了保存等待状态,还会在地址计算完成后保存有效地址 A。load 在地址和内存条件满足后读取数据;store 则要等待地址和待写数据都可用,才能真正写入内存。
| 阶段 | 主要动作 | 需要等待的条件 |
|---|---|---|
| Issue | 分配保留站,记录操作码和目的 tag | 保留站或缓冲区必须空闲 |
| 取操作数 | 可用值写入 Vj/Vk,不可用值写入 Qj/Qk | 等待生产者 tag |
| Execute | 操作数齐全后进入功能单元 | Qj=0 且 Qk=0 |
| Write Result | 通过 CDB 广播 (tag,value) | CDB 可用,功能单元完成 |
用流程语言描述就是:发射时先占住一个保留站;如果源操作数已经在寄存器中,就把值复制进去;如果源操作数还在路上,就记录它的生产者 tag。等两个源操作数都到齐,功能单元才开始执行。结果出来后通过 CDB 广播,所有等待该 tag 的位置同时更新。
对于 store,结果广播并不是写寄存器,而是让 store buffer 获得要写入的数据;当 store 的地址和数据都可用后,才能执行内存写入。对于 load,读取的数据会像普通运算结果一样通过 CDB 广播给依赖者。
保留站释放
一般在结果广播后释放保留站,而不是在指令刚开始执行时释放。因为保留站还承担“结果身份”的作用,其他指令可能正在等待它的 tag。
3.5 访存处理
访存指令比普通浮点运算更复杂,因为内存地址本身也可能依赖前面指令。
load 通常需要等待:
- 基址寄存器可用;
- 有效地址计算完成;
- 更早的 store 不会写同一地址,或已经完成必要检查。
store 可以分成两部分处理:
- 地址可以在基址寄存器可用后先计算;
- 要写入的数据可以稍后到达,只要在真正写内存前准备好即可。
没有硬件推测时,Tomasulo 可以乱序执行并乱序完成,但结果一旦通过 CDB 写入寄存器,就已经修改了体系结构状态,因此还不能自然支持精确异常和错误分支回滚。
这也是 Tomasulo 与硬件推测之间的分界:Tomasulo 解决的是“如何乱序执行”,但不完整解决“乱序执行后如何按顺序生效”。如果一条较晚指令先写回寄存器,而较早指令随后发生异常,处理器就很难恢复到“异常指令之前所有指令完成、之后所有指令未完成”的精确状态。
4. 硬件推测
4.1 引入动机
动态分支预测解决控制冒险的一半问题:预测接下来要走哪条路径。另一半问题是:在分支尚未确认前,能不能先执行预测路径上的指令?
硬件推测 (Hardware Speculation) 将分支预测、Tomasulo 和提交机制结合起来:
- 预测正确时,提前执行的指令可以继续提交;
- 预测错误时,丢弃预测路径上的结果并重新取指;
- 任何指令在真正安全之前,都不能永久修改寄存器或内存。
因此硬件推测的核心是:
\[ \text{乱序执行} + \text{顺序提交} \]这意味着执行结果会先进入临时结构,而不是马上改变体系结构寄存器或内存。只要分支还没有确认,或者更早的指令还没有提交,后续指令即使已经算出结果,也只能停留在“完成但未提交”的状态。
4.2 ROB
重排序缓冲区 (Reorder Buffer, ROB) 保存已经执行完成但尚未提交的结果。它让结果先进入临时缓冲,而不是直接写入寄存器或内存。
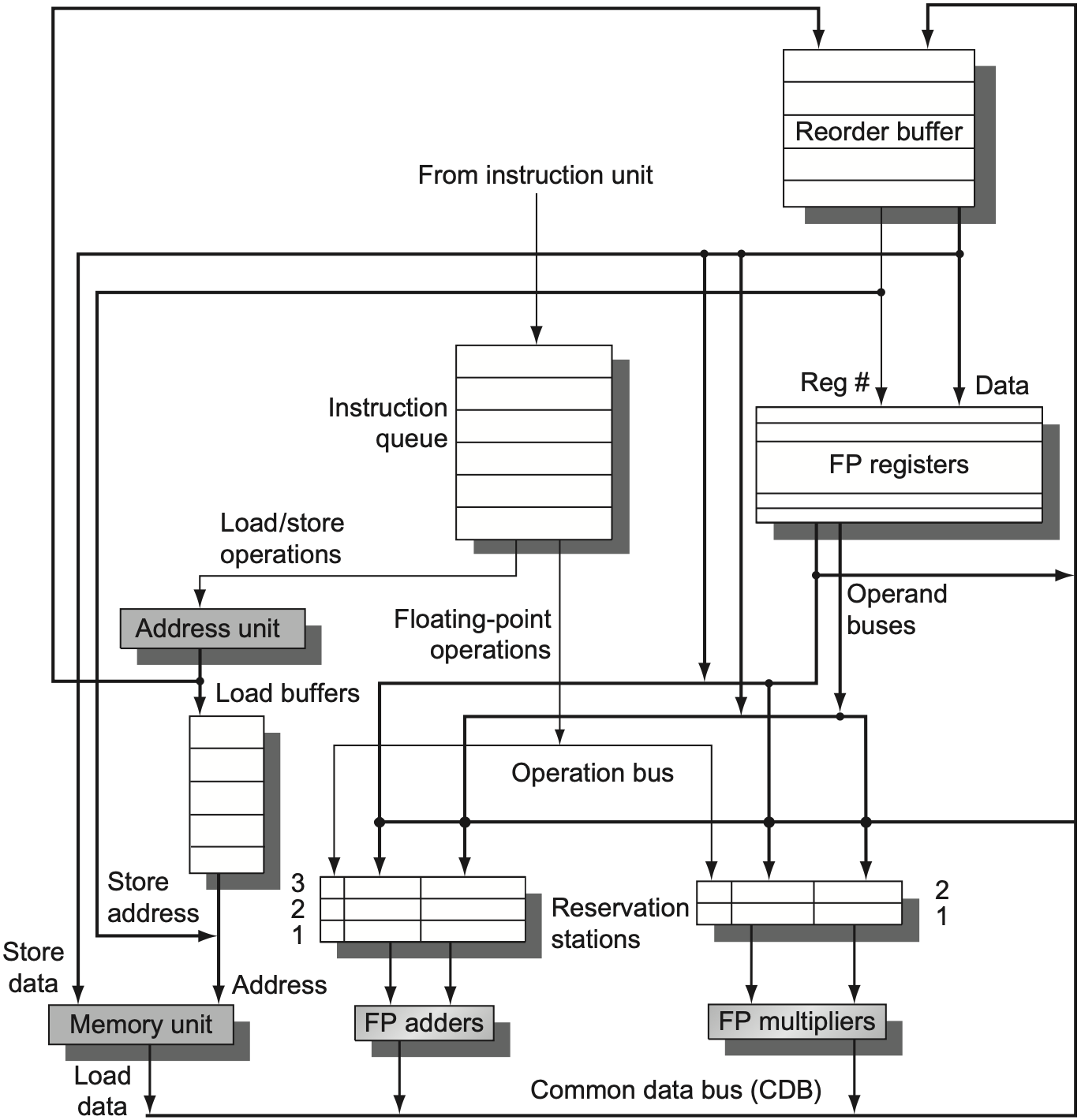
ROB 的作用包括:
- 保存推测执行产生的结果;
- 按程序顺序提交指令;
- 为后续指令提供尚未提交的源操作数;
- 在分支预测错误或异常发生时清空错误路径。
ROB 可以看成一条按程序顺序排列的“提交队列”。指令可以在队列中乱序变成 ready,但只能从队首按顺序离开队列。这样既保留了乱序执行带来的并行性,又让外部看到的寄存器和内存更新仍然像顺序执行一样。
ROB 表项常见字段如下:
| 字段 | 含义 |
|---|---|
Instruction type | branch、store、寄存器操作、load 等 |
Destination | 目的寄存器号,或 store 的内存地址 |
Value | 指令执行完成后的结果 |
Ready | 结果是否已经可提交 |
4.3 推测流程
加入 ROB 后,Tomasulo 的三步变成四步:
- Issue:分配保留站和 ROB 表项,目的寄存器重命名为 ROB 编号;
- Execute:操作数可用后执行;
- Write result:结果通过 CDB 写入 ROB,并广播给等待的保留站;
- Commit:只有到达 ROB 队首且结果 ready 时,才正式更新寄存器或内存。
| 阶段 | ROB 相关动作 | 结果是否生效 |
|---|---|---|
| Issue | 分配 ROB 表项,目的寄存器指向该 ROB 编号 | 未生效 |
| Execute | 使用寄存器、ROB 或 CDB 提供的操作数执行 | 未生效 |
| Write result | 结果写入 ROB,并通过 CDB 唤醒依赖者 | 未生效 |
| Commit | 队首 ready 后写入寄存器或内存 | 正式生效 |
结果写回阶段不直接修改体系结构寄存器,而是写入 ROB。寄存器真正改变发生在 Commit 阶段。
因此,Write result 和 Commit 是两个不同概念:前者说明“值已经算出来”,后者说明“这条指令已经不再处于推测状态,可以影响程序可见状态”。这一区分是精确异常和分支回滚的基础。
4.4 提交流程
提交必须保持程序顺序。ROB 队首指令根据类型采取不同动作:
- 普通寄存器指令 / load:若结果 ready,将 ROB 中的值写入目的寄存器;
- store:若地址和数据 ready,写入内存;
- 预测正确的 branch:释放该 ROB 表项,继续提交后续指令;
- 预测错误的 branch:清空错误路径上的 ROB 表项和保留站,从正确目标重新取指;
- 异常指令:在到达 ROB 队首时精确报告异常,保证此前指令都已提交,此后指令都未提交。
这就是硬件推测能够保持 精确异常 (precise exception) 的原因:即使执行是乱序的,体系结构状态的更新仍然是顺序的。
4.5 处理冒险
硬件推测下的数据冒险处理可以概括为:
- RAW:后续指令等待前序 ROB 表项或 CDB 广播结果;
- WAR / WAW:通过 ROB 编号进行寄存器重命名,消除名字依赖;
- 控制冒险:通过分支预测先执行,预测错误时由 ROB 回滚;
- 内存 RAW:load 必须检查更早 store 是否可能写同一地址。
对于 store,写内存必须推迟到 Commit 阶段。否则一旦预测错误或异常发生,已经写入内存的副作用很难回滚。
load/store 还需要额外处理内存相关。寄存器相关可以通过 tag 明确知道生产者是谁,但两个内存地址是否相同,往往要等地址计算后才知道。因此较晚的 load 不能随意越过较早的未知地址 store;如果地址相同,必须先让 store 提供正确数据或等待 store 提交。
PPT 中为了简化处理,给出过更保守的策略:在没有比较所有 store 地址字段的情况下,可以要求较早的 store 先完成,再允许后续 load 访问内存。更激进的实现会做地址比较和 store-to-load forwarding,但硬件复杂度也更高。
为什么要 ROB
Tomasulo 只解决“能不能早点执行”的问题;ROB 解决“什么时候结果才算正式生效”的问题。前者提高并行度,后者保证精确异常、分支回滚和顺序提交。
5. 动态并行
5.1 技术对比
| 技术 | 解决问题 | 核心结构 | 主要限制 |
|---|---|---|---|
| 分支预测 | 控制冒险 | BHT、BTB、局部/全局历史 | 预测错误需要清空路径 |
| 记分牌 | 运行时调度 | 全局状态表 | WAR/WAW 仍靠停顿 |
| Tomasulo | 乱序执行 | 保留站、CDB、tag | 无 ROB 时难以精确回滚 |
| 硬件推测 | 提前执行分支后指令 | ROB、顺序提交 | 需要更多缓冲和恢复逻辑 |
动态并行技术的整体目标,是在不破坏程序语义的前提下尽量突破顺序执行限制:
- 分支预测减少控制停顿;
- 动态调度减少数据等待;
- 寄存器重命名消除名字依赖;
- ROB 保证乱序执行后的顺序提交。
5.2 执行模型
现代乱序处理器可以抽象为以下模型:
| 阶段 | 作用 |
|---|---|
| Fetch | 根据分支预测持续取指 |
| Decode / Rename | 解码并把架构寄存器映射到物理 tag 或 ROB 表项 |
| Issue | 分配保留站、Load/Store Queue 和 ROB 项 |
| Execute | 操作数就绪后乱序执行 |
| Write Result | 结果写入 ROB,并广播给依赖指令 |
| Commit | 按 ROB 顺序更新体系结构状态 |
这条路径把“执行顺序”和“提交顺序”分离开来。执行顺序由数据是否就绪、功能单元是否空闲决定;提交顺序仍然由原始程序顺序决定。
5.3 核心结论
动态 ILP 的关键不在于让程序完全失去顺序,而是把顺序拆成两类:
- 必须保留的顺序:数据流、异常行为、内存可见副作用;
- 可以打破的顺序:无关指令的执行先后、功能单元占用顺序、预测路径上的临时计算。
因此,动态并行的本质是:
- 在保持体系结构状态顺序可解释的前提下,让微架构内部尽可能乱序。
从记分牌到 Tomasulo,再到带 ROB 的硬件推测,硬件逐步把更多“等待”转化为“暂存、标记、广播、提交”的问题,也就逐步扩大了可以挖掘的指令级并行空间。