Ch-4 数据级并行架构
1. 数据级并行
1.1 基本思想
数据级并行 (Data-Level Parallelism, DLP) 指的是:同一类操作可以同时作用在大量数据元素上。它利用的是数据集合内部的并行性,而不是多个独立控制流之间的并行性。
典型例子包括矩阵计算、图像与音频处理、机器学习中的张量运算等。这些程序常常会对数组、向量或矩阵中的许多元素执行相同操作,例如:
for(i=0;i<n;i++)
{
y[i]=a*x[i]+y[i];
}从硬件角度看,DLP 的吸引力在于:一条指令可以启动很多个数据操作。指令取指、译码、发射等控制开销只付一次,却能覆盖一批元素,因此能效往往比为每个元素单独发射标量指令更好。
DLP 也比传统 MIMD 并行更容易编程。MIMD 程序员需要显式考虑线程划分、同步、通信和负载均衡;而 DLP 程序通常只需要表达“这批元素做同一件事”,剩下的并行执行细节交给向量硬件、SIMD 指令或 GPU 运行时。
常见 DLP 架构包括:
| 架构 | 基本方式 | 典型特点 |
|---|---|---|
| 向量架构 | 一条向量指令处理一组元素 | 支持向量长度、步长、掩码等机制 |
| 多媒体 SIMD | 一条短向量指令处理固定数量元素 | 指令简单,适合音视频和小向量数据 |
| GPU | 大量线程以 SIMT 方式执行 | 线程数量巨大,依靠硬件调度隐藏延迟 |
1.2 向量架构
向量架构 (Vector Architecture) 的核心思想是:先把一组数据元素从内存取入向量寄存器,再由向量功能单元对整组元素执行运算,最后把结果写回内存。
可以把它理解为四步:
- Grab:从内存中取出一组数据元素;
- Place:放入连续的向量寄存器;
- Operate:用向量功能单元逐元素运算;
- Disperse:把结果分散写回内存。
一条向量指令在语义上只是一条指令,但实际会展开成许多相互独立的寄存器-寄存器操作。例如一条向量加法可以完成几十个元素的加法,这些元素之间没有循环携带依赖,因此天然适合流水化和并行化。
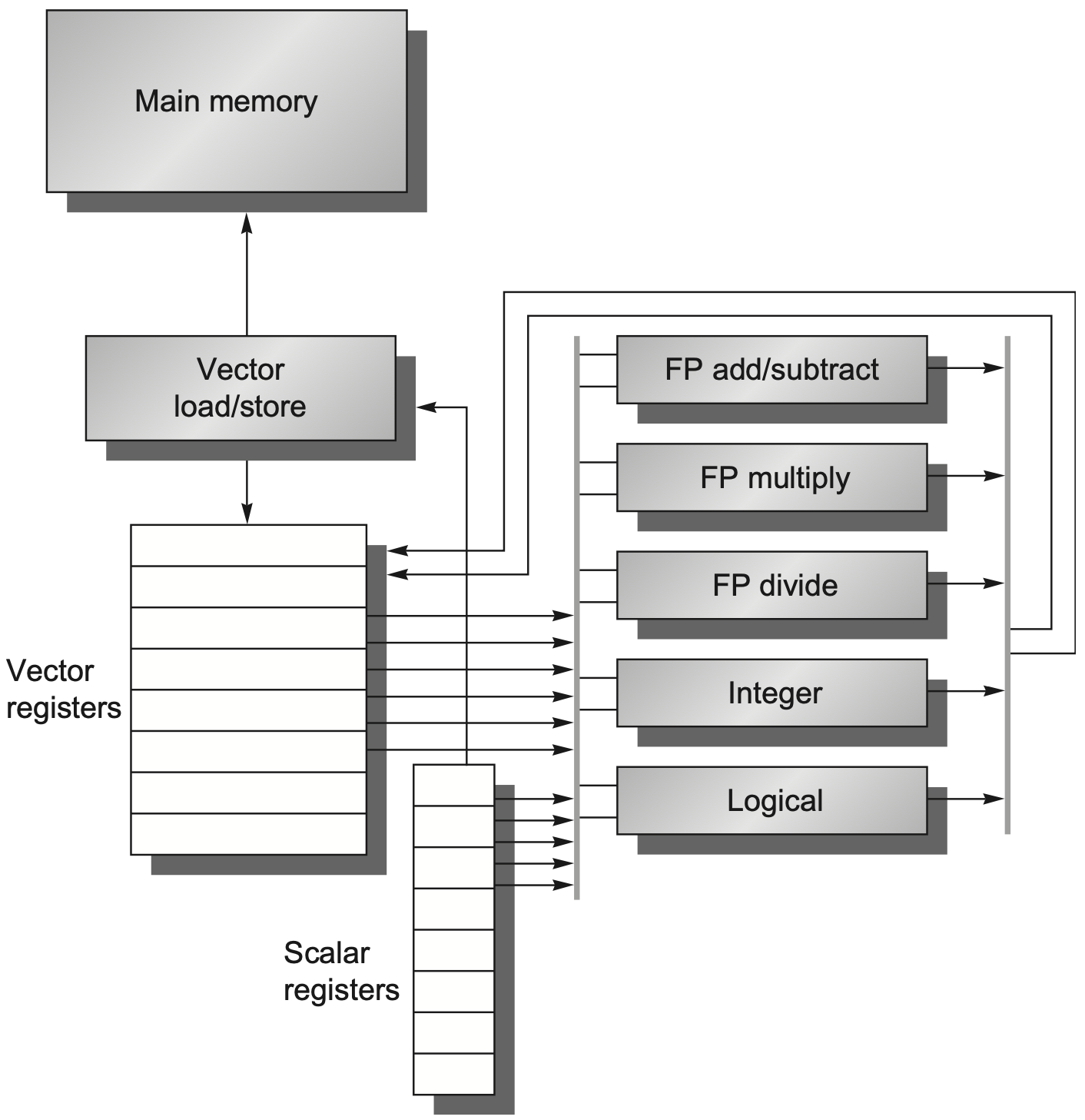
RV64V 这一类向量扩展通常包含:
- 多个向量寄存器,用于保存整组元素;
- 向量 load/store 单元,用于批量访问内存;
- 向量整数、浮点等功能单元,用于流水化执行;
- 标量整数寄存器和浮点寄存器,用于提供地址、标量操作数和控制信息;
- 控制逻辑,用于检测结构冒险和数据冒险。
PPT 中的 RV64V 例子包含 32 个向量寄存器,并通过 crossbar 把寄存器文件连接到多个向量功能单元。其设计目标不是让一条指令只完成一个标量操作,而是让向量功能单元在流水线填满后持续接收新元素。因此寄存器端口、load/store 带宽和功能单元启动率都会直接影响最终吞吐。
与普通标量流水线不同,向量功能单元通常是深流水的:第一批元素进入后,后续元素可以每个周期连续进入。只要流水线填满,就能接近每周期产生一个元素结果。
1.3 指令形式
向量指令需要说明操作数来自向量还是标量。RV64V 中常见后缀可以按如下方式理解:
| 后缀 | 含义 | 例子 |
|---|---|---|
.vv | vector-vector | 两个向量逐元素相加 |
.vs | vector-scalar | 每个向量元素都与同一个标量相乘 |
.sv | scalar-vector | 标量作为第一个操作数,向量作为第二个操作数 |
例如 vmul.vs v1,v0,f0 表示:把向量寄存器 v0 中的每个元素与标量浮点寄存器 f0 相乘,结果写入 v1。
向量指令的关键不只是“并行做很多次”,还包括减少循环控制开销。标量代码每次迭代都要进行地址更新、循环计数和分支判断;向量代码把一批元素合成少数几条向量指令,循环控制次数明显减少。
1.4 动态类型
RV64V 采用类似动态寄存器类型 (dynamic register typing) 的思想:指令编码中不总是显式写出数据类型和元素宽度,而是先通过配置指定当前向量寄存器如何解释。
这种做法有几个好处:
- 减少指令编码数量,不必为每种类型都设计一套独立指令;
- 同一条向量指令可以在不同配置下处理不同元素宽度;
- 未启用的向量寄存器资源可以合并给已启用寄存器,从而增加每个寄存器可容纳的元素数;
- 允许硬件根据当前配置处理必要的数据宽度转换。
例如总向量寄存器空间固定时,如果启用的向量寄存器更少,每个启用寄存器可以分到更长的向量空间。这使得架构能在“寄存器数量”和“单个向量长度”之间做折中。
向量寄存器不是普通标量寄存器
标量寄存器通常保存一个值;向量寄存器保存一组元素。向量指令看起来只写一个目的寄存器,但实际写入的是目的向量寄存器中的多个元素位置。
2. 向量执行
2.1 DAXPY
PPT 用 DAXPY 作为向量化例子。DAXPY 来自 double-precision a*X+Y,即对双精度数组执行:
for(i=0;i<n;i++)
{
Y[i]=a*X[i]+Y[i];
}在标量 RISC-V 中,这个循环需要反复执行 load、multiply、load、add、store、地址递增、循环判断等指令。每个元素都要走一遍循环控制。
在 RV64V 中,如果 X 和 Y 各有 32 个元素,并且向量寄存器足够容纳这 32 个双精度元素,可以写成类似:
vsetdcfg 2*FP64
fld f0,a
vld v0,x5
vmul.vs v1,v0,f0
vld v2,x6
vadd.vv v3,v1,v2
vst x6,v3
vdisable这里 x5、x6 分别保存 X 和 Y 的起始地址。vld 一次装入整段向量,vmul.vs 完成所有 a*X[i],vadd.vv 完成所有加法,vst 再一次性写回结果。
向量版本的重要特点是:不同迭代之间没有循环携带依赖。第 i 个元素和第 j 个元素的乘加相互独立,因此硬件可以流水化地处理整组数据,而不需要等待前一个元素完全结束后才开始下一个元素。
2.2 链式执行
向量运算并不一定要等整条前序向量指令完全结束后,后序向量指令才能开始。Chaining 允许后序指令在前序指令产生某个元素结果后,立刻消费这个元素。
例如:
vmul.vs v1,v0,f0
vadd.vv v3,v1,v2vadd.vv 依赖 vmul.vs 的结果 v1。如果没有 chaining,就要等 v1 的所有元素都算完,再开始加法;有 chaining 时,第 0 个乘法结果一出来,第 0 个加法就可以开始,之后第 1 个、第 2 个元素继续流水前进。
这样做的效果类似标量流水线中的 forwarding,但粒度是“向量元素”。它减少了相关向量指令之间的等待时间,使一串向量运算能够像流水线一样首尾相接。
Flexible chaining 更进一步,允许一条向量指令几乎和任意正在执行的相关向量指令相连,而不是只允许固定功能单元之间的特定转发路径。这提高了调度灵活性,但也增加了旁路网络和控制逻辑复杂度。
2.3 Convoy
分析向量执行时间时,PPT 引入两个概念:
| 概念 | 含义 |
|---|---|
| Convoy | 一组可以潜在并行执行的向量指令 |
| Chime | 执行一个 convoy 所需的时间单位 |
同一个 convoy 中的指令不能有结构冒险。例如只有一个向量 load/store 单元时,两条 vld 不能放在同一个 convoy;vld 和 vst 也可能争用同一访存单元。
但 RAW 数据依赖可以在同一个 convoy 中出现,因为 chaining 可能让消费者在生产者产生元素后立刻继续执行。
以前面的 DAXPY 为例,假设只有一份向量功能单元,且 vld/vld、vld/vst 有结构冲突,可以分成:
| Convoy | 指令 | 原因 |
|---|---|---|
| 1 | vld v0,x5,vmul.vs v1,v0,f0 | 乘法可与前序 load 链接 |
| 2 | vld v2,x6,vadd.vv v3,v1,v2 | 加法可等待对应元素 |
| 3 | vst x6,v3 | store 需要单独使用访存单元 |
如果向量长度为 n=32,每个 chime 近似需要 32 个周期,那么 3 个 chime 约为:
DAXPY 对每个元素包含一次乘法和一次加法,32 个元素共 64 个浮点操作。因此:
更一般地,如果一个向量指令序列包含 m 个 convoy,向量长度为 n,忽略指令发射开销和启动延迟时,总时间可粗略估为:
2.4 多车道
单条向量流水线每周期通常只能启动一个元素。为了进一步提高吞吐量,向量处理器可以使用多个 lanes。
每个 lane 拥有一部分向量寄存器存储和一组功能单元。向量元素被分散到不同 lane 中执行,因此多个元素可以在同一周期同时前进。
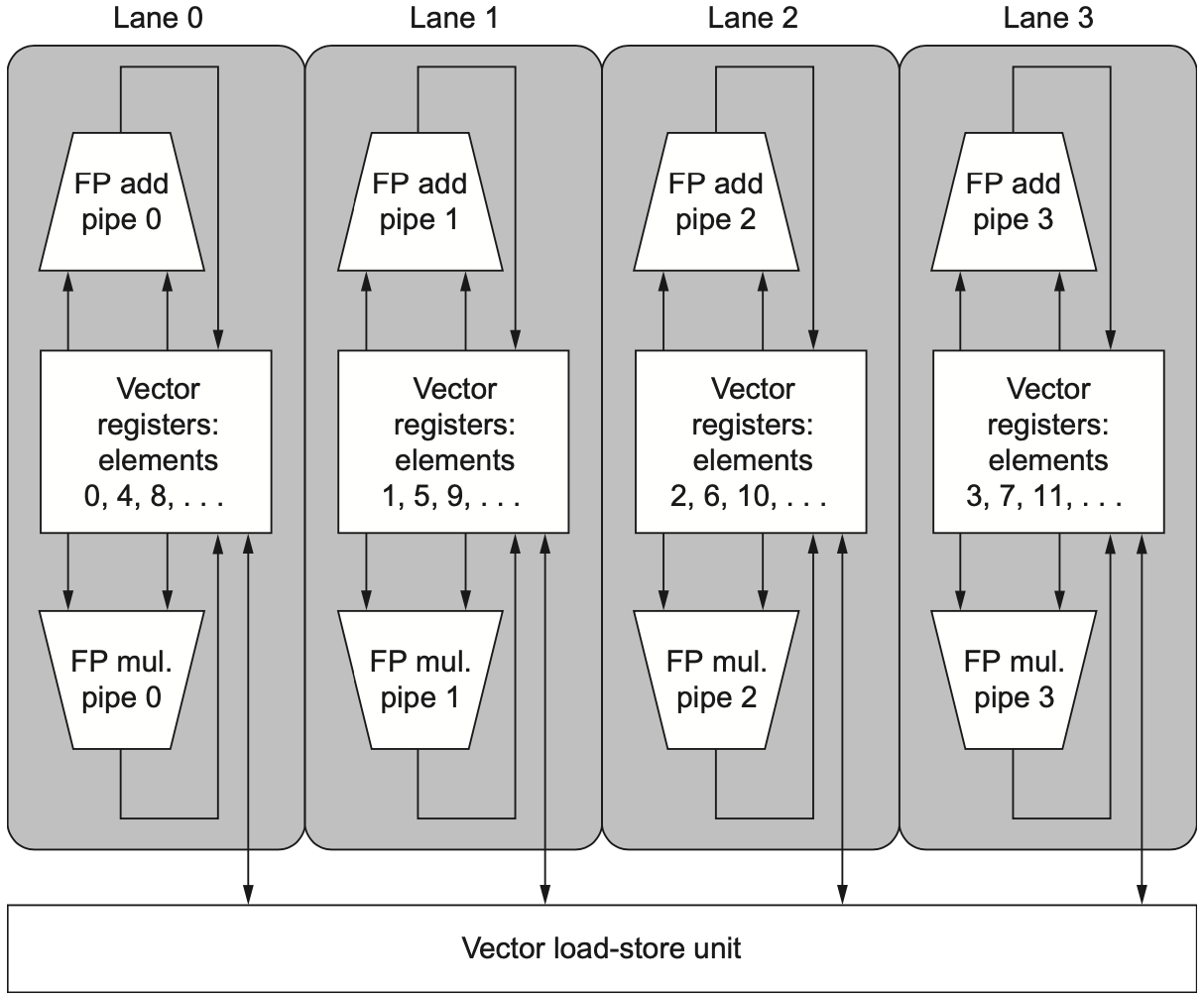
多车道的直观效果是:原本每周期处理 1 个元素,现在可以每周期处理多个元素。假设有 4 个 lanes,并且访存和功能单元都能跟上,那么 64 个元素的向量操作理想情况下可以接近 16 个周期完成。
不过 lane 数增加后,硬件也要解决更多问题:
- 向量寄存器文件需要按 lane 分布,避免端口数爆炸;
- load/store 单元需要提供足够带宽;
- 不同 lane 的结果需要按正确元素顺序组织;
- 跨 lane 的规约、重排、压缩等操作会更复杂。
2.5 向量长度
真实程序的数组长度不一定刚好等于最大向量长度。向量架构通常使用 vector-length register,记为 vl,指定本次向量指令实际处理多少个元素。
若最大向量长度为 mvl,则每次向量操作必须满足:
对于长度为 n 的数组,编译器会使用 strip mining:把长循环切成若干段,每段最多处理 mvl 个元素,最后一段处理剩余元素。
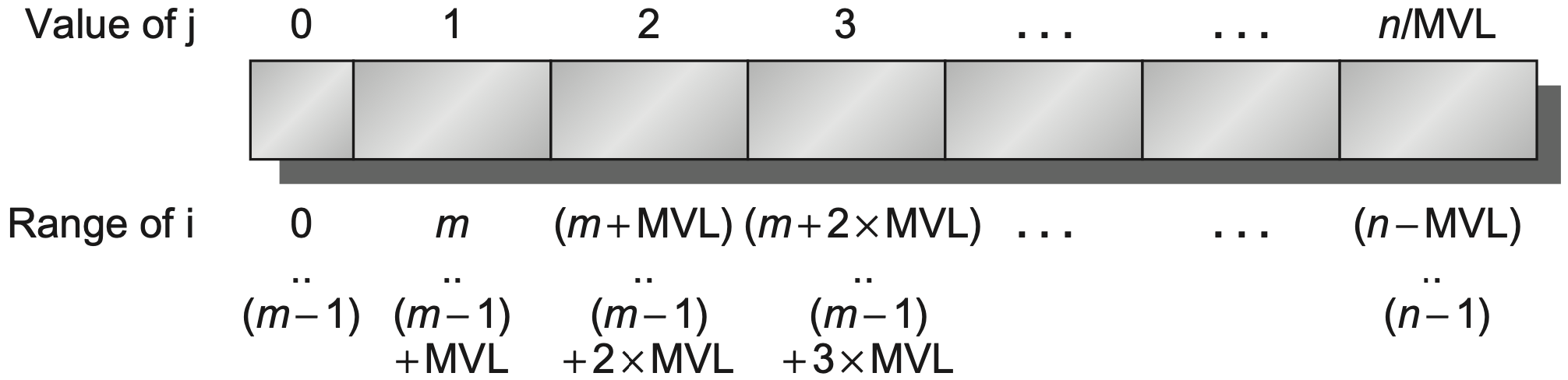
RV64V 中可以用 setvl 设置本轮长度,语义可理解为:
vl=min(mvl,n)因此任意长度的 DAXPY 可以写成“每轮处理 vl 个元素,然后移动指针并减少剩余元素数”的形式:
vsetdcfg 2*FP64
fld f0,a
loop:
setvl t0,a0
vld v0,x5
vmul.vs v1,v0,f0
vld v2,x6
vadd.vv v3,v1,v2
vst x6,v3
slli t1,t0,3
add x5,x5,t1
add x6,x6,t1
sub a0,a0,t0
bnez a0,loop
vdisable其中双精度元素为 64 bit,即 8 byte,所以地址每轮增加 vl*8。x5/x6 追踪下一段 X/Y 的起始地址,a0 记录还剩多少元素。
3. 向量访存
3.1 谓词寄存器
循环中常常包含条件判断。例如只有当 X[i]!=0 时才更新 Y[i]:
for(i=0;i<n;i++)
{
if(X[i]!=0)
{
Y[i]=a*X[i]+Y[i];
}
}如果直接分支,向量化会很麻烦,因为每个元素的分支方向可能不同。向量架构用谓词寄存器 (predicate register) 或 mask 解决这个问题。
谓词寄存器保存一组 0/1 位,每一位对应一个向量元素:
- mask 为
1的元素参与后续向量操作; - mask 为
0的元素不执行操作; - 目的寄存器中 mask 为
0的对应位置保持不变。
这样,编译器可以把 if 转换成直线代码,也就是 IF-conversion。控制依赖被转化为数据掩码,硬件仍然按向量方式执行,只是对部分元素关闭写入。
谓词不是预测
分支预测是在不知道结果时猜下一条路;谓词执行是在已经得到条件结果后,用 mask 决定哪些元素真正生效。它减少的是向量程序中的分支控制复杂度。
3.2 存储体
向量处理器需要持续给功能单元喂数据,因此内存系统必须支持高吞吐。常见做法是把内存分成多个 memory banks,让多个 load/store 请求可以并行访问不同 bank。
问题在于,单个 bank 的忙碌时间通常比处理器周期更长。如果连续请求总是落到同一个 bank,就会发生 bank conflict,流水线必须停顿。
PPT 中的 Cray T90 例子:
- 32 个处理器;
- 每个处理器每周期最多 4 次 load 和 2 次 store;
- 处理器周期为
2.167 ns; - SRAM 周期为
15 ns。
满带宽下,每个处理器周期的最大访存请求数为:
\[ (4+2)\times 32=192 \]一个 SRAM 周期约等于:
\[ \frac{15}{2.167}\approx 6.92\approx 7 \]因此至少需要:
\[ 192\times 7=1344 \]个 memory banks,才能让所有处理器在理想情况下持续获得满内存带宽。
这个例子说明:向量机的瓶颈不只在算术单元,也在内存带宽和 bank 组织。功能单元再快,如果数据供不上,吞吐量仍然上不去。
3.3 步长访问
Stride 表示被装入同一个向量寄存器的相邻元素在内存中的距离。
| 类型 | 含义 | 例子 |
|---|---|---|
| unit stride | 步长为 1,访问连续元素 | A[i],A[i+1],A[i+2] |
| nonunit stride | 步长大于 1,访问间隔元素 | 矩阵按列访问 row-major 数组 |
在 C 的 row-major 二维数组中,一行内元素通常连续;如果按列访问,相邻逻辑元素在内存中会相隔一整行的大小,因此会形成 nonunit stride。
向量架构提供带步长的 load/store,例如:
vlds v0,x5,x7
vsts x6,x7,v1这里 x7 可以保存 stride,表示相邻向量元素对应的内存地址间隔。
步长会直接影响 bank conflict。PPT 给出的例子:
- 8 个 memory banks;
- bank busy time 为 6 个周期;
- 总内存延迟为 12 个周期;
- 访问 64 个元素。
当 stride=1 时,访问会依次落到不同 bank 上。因为 bank 数 8 大于 busy time 6,等再次访问同一个 bank 时,它已经空闲,因此没有 bank conflict。总时间约为:
当 stride=32 时,32\%8=0,每次访问都落到同一个 bank。第二次访问开始就会持续冲突,总时间变为:
判断是否容易冲突,可以看“再次访问同一个 bank 的间隔”是否小于 bank busy time:
\[ \frac{LCM(stride,banks)}{stride}<bank\_busy\_time \]若不等式成立,同一个 bank 还没空闲就又被访问,会产生停顿。比如 stride=6、banks=16 时,访问序列为 0,6,12,2,8,14,4,10,0...,再次访问 bank 0 的间隔为 8 次访问。
3.4 聚集分散
普通 stride 访问仍然假设元素之间有固定间隔。但稀疏矩阵、图算法等程序中,非零元素位置可能完全不规则。此时需要 gather-scatter。
| 机制 | 作用 |
|---|---|
| Gather | 根据索引向量,从多个不连续地址取数并压入向量寄存器 |
| Scatter | 根据索引向量,把向量寄存器中的结果写回多个不连续地址 |
例如稀疏数组 A 和 C 的非零位置由索引向量 K 和 M 指定。Gather 会从 A[K[i]] 读取有效元素,形成紧凑向量;计算完成后,scatter 再把结果写回 C[M[i]]。
RV64V 中可以用:
vldx v0,x5,vk
vstx x6,vm,v1vldx 表示 indexed load,也就是 gather;vstx 表示 indexed store,也就是 scatter。
Gather-scatter 扩展了向量架构能处理的数据布局,但代价也明显:访存地址不连续,容易造成 bank conflict、cache miss 或合并访存困难。因此它通常比 unit stride 访问慢,适合在数据结构无法改成连续布局时使用。
4. 多媒体 SIMD
4.1 固定向量
Multimedia SIMD 可以看作向量架构的简化版本。它仍然是一条指令处理多个数据元素,但通常使用固定宽度的短向量寄存器,例如 128-bit、256-bit 或 512-bit。
这类指令常被用于多媒体处理,也依赖编译器或程序员提供更明确的并行化线索。硬件只提供固定宽度的数据通路,至于循环展开、尾部处理、对齐和数据重排,往往需要软件更多参与。
如果使用 256-bit SIMD 处理双精度浮点数,每个元素 64-bit,那么一条 SIMD 指令可以同时处理:
\[ \frac{256}{64}=4 \]个 double 元素。
RISC-V SIMD 风格的 DAXPY 可以写成类似:
fld f0,a
loop:
vld.4D v0,x5
vmul.4D v1,v0,f0
vld.4D v2,x6
vadd.4D v3,v1,v2
vst.4D x6,v3
addi x5,x5,32
addi x6,x6,32
addi n,n,-4
bnez n,loop.4D 表示一条指令同时操作 4 个 double。每轮处理 4 个元素,因此地址增加 4*8=32 字节。
相比完整向量架构,多媒体 SIMD 通常省略:
- vector length register;
- strided load/store;
- gather/scatter;
- mask/predicate register。
这让 SIMD 指令硬件更简单,也更容易集成到通用处理器里;但程序员或编译器需要更多处理边界元素、非连续数据和条件执行的问题。
4.2 Roofline
Roofline Model 用二维图把浮点性能、内存带宽和算术强度联系起来,用于判断一个程序更可能受计算限制还是受内存限制。
核心指标是 arithmetic intensity:
\[ Arithmetic\ Intensity=\frac{FP\ operations}{Bytes\ accessed} \]如果一个程序每读写很多字节只做很少计算,它的算术强度低,通常受内存带宽限制。反过来,如果每个字节能带来大量计算,它更可能接近处理器峰值浮点性能。
DAXPY 每个元素做 2 次浮点操作:一次乘法和一次加法。若读 X[i]、读 Y[i]、写 Y[i] 都按 double 计,则每个元素访问约 24 字节,算术强度约为:
这说明 DAXPY 更偏向内存带宽受限。即使算术单元很强,如果内存系统无法持续提供 X/Y 数据,实际性能仍然很难接近峰值 FLOPS。
5. CUDA 与 GPU
5.1 CUDA 模型
GPU 也是 DLP 架构,但它不直接暴露成传统向量寄存器模型,而是让程序员写大量轻量线程。CUDA 中的基本层次是:
| 层次 | 含义 |
|---|---|
| Thread | 最小执行实体,每个线程处理一小份数据 |
| Thread Block | 一组线程,可在同一个多线程 SIMD 处理器上执行 |
| Grid | 一次 kernel launch 中的所有 thread blocks |
CUDA 的全称是 Compute Unified Device Architecture。它把 CPU 称为 host,把 GPU 称为 device:
- host 端使用普通 C/C++;
- device 端使用 CUDA C/C++ 扩展;
- 大量 CUDA threads 通过 SIMT 方式执行;
- thread blocks 被分配到 GPU 的多线程 SIMD 处理器上。
CUDA 函数常见限定符包括:
| 限定符 | 含义 |
|---|---|
__host__ | 在 CPU 上执行 |
__device__ | 在 GPU 上执行,由 GPU 代码调用 |
__global__ | kernel 函数,在 GPU 上执行,由 host 调用 |
用 __device__ 声明的变量分配在 GPU 内存中,可以被 GPU 上的多线程 SIMD 处理器访问。
5.2 Kernel
CUDA kernel 的调用形式是:
name<<<dimGrid,dimBlock>>>(parameter_list);其中:
dimGrid表示 grid 中有多少个 thread blocks;dimBlock表示每个 block 中有多少 threads;blockIdx是当前 block 的编号;threadIdx是当前 thread 在 block 内的编号;blockDim是每个 block 的维度。
DAXPY 的 CUDA kernel 可以写成:
__global__
void daxpy(int n,double a,double *x,double *y)
{
int i=blockIdx.x*blockDim.x+threadIdx.x;
if(i<n)
{
y[i]=a*x[i]+y[i];
}
}host 端启动 kernel:
int nblocks=(n+255)/256;
daxpy<<<nblocks,256>>>(n,2.0,x,y);这里每个线程处理一个元素。(n+255)/256 是向上取整,用来保证 n 个元素都被覆盖。最后一个 block 可能有部分线程对应的 i>=n,因此 kernel 中需要 if(i<n) 防止越界。
GPU 硬件负责线程并行执行和线程管理。thread blocks 之间必须相互独立,可以以任意顺序执行,通常不能直接通信。这个限制让硬件调度更自由,也让同一个 kernel 能在不同规模的 GPU 上运行。
例如要处理 8192 个元素,可以让每个线程处理 32 个元素,每个 block 包含 16 个线程,总共启动 16 个 blocks。这样 grid 决定整体任务规模,block 决定调度粒度,thread 决定每份数据的具体计算。
5.3 SIMD 处理器
GPU 内部并不是每个线程都有一套完整独立硬件。更常见的组织方式是:许多线程被组合成一组,以 SIMT 方式在 SIMD lanes 上执行。
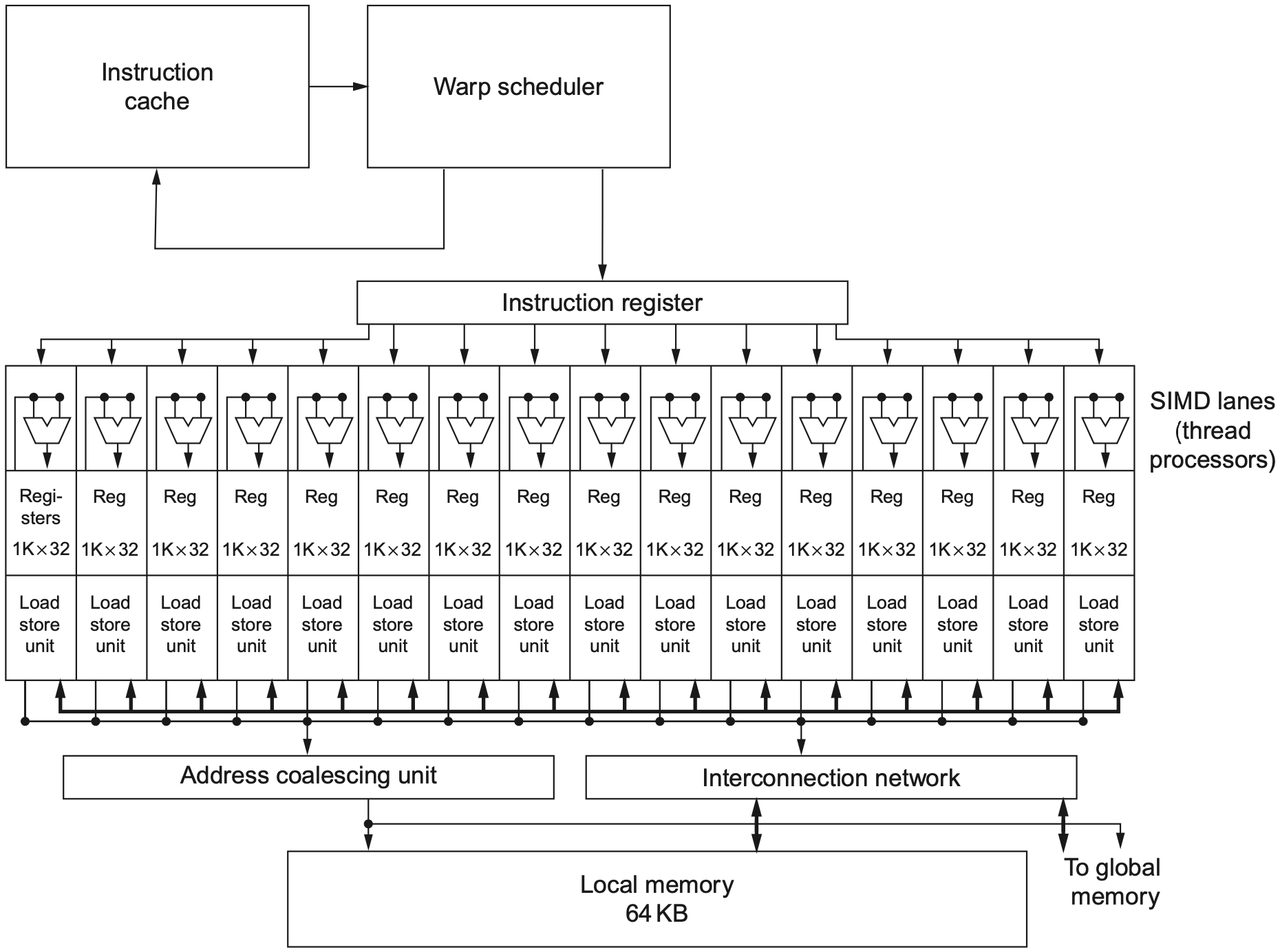
一个多线程 SIMD 处理器中通常包含:
- 多个 SIMD lanes,负责并行执行同一条指令的不同线程实例;
- SIMD thread scheduler,选择哪些线程组的指令可以发射;
- 寄存器文件,用于保存大量线程上下文;
- load/store 单元和互连,用于访问共享内存或全局内存。
GPU 通过大量线程隐藏延迟。当某一组线程因为内存访问而等待时,调度器可以切换到另一组已经就绪的线程继续执行。这样不需要像 CPU 那样依赖很大的 cache 和复杂乱序执行,也能维持较高吞吐。
GPU 调度可以理解为两级:
| 调度器 | 职责 |
|---|---|
| Thread Block Scheduler | 把 thread blocks 分配到多线程 SIMD 处理器 |
| SIMD Thread Scheduler | 在一个 SIMD 处理器内部选择就绪线程组发射 |
这种结构的关键目标不是降低单个线程延迟,而是提高整体吞吐量。
5.4 PTX
NVIDIA GPU 使用 PTX (Parallel Thread Execution) 作为稳定的中间指令集。编译器可以生成 PTX,之后再由软件或加载阶段把 PTX 翻译成具体 GPU 代际的内部指令。
PTX 的作用类似一个可移植层:
- 对编译器提供相对稳定的目标;
- 让同一份程序可以在不同 GPU 代际上运行;
- 允许 GPU 驱动在加载时做针对具体硬件的翻译和优化。
PTX 指令格式可概括为:
opcode.type d,a,b,c其中 opcode 是操作码,.type 是数据类型,d 是目的操作数,a/b/c 是源操作数。对于非 store 指令,目的操作数通常是寄存器;对于 store 指令,目的位置是内存地址。
例如 DAXPY 的 PTX 会包含三类核心操作:
- 计算线程编号:由
blockIdx、blockDim、threadIdx得到全局索引; - 计算地址:每个 double 为 8 字节,所以地址偏移为
i*8; - 执行 load、multiply、add、store。
PTX 暴露的是“每个线程要做什么”,而硬件负责把许多线程映射到 SIMD lanes 上执行。
5.5 分支处理
GPU 的 SIMT 执行对分支很敏感。一个线程组中的线程共享同一条指令流,如果它们在同一个 if 上走向不同路径,就会发生 divergence。
GPU 处理条件分支依赖几类硬件:
- predicate registers;
- internal masks;
- branch synchronization stack;
- instruction markers。
谓词寄存器在 PTX 汇编层面可见,每个线程 lane 有自己的 1-bit predicate。setp 指令会设置这些 predicate 位。
当执行 THEN 部分指令时,指令仍然广播到所有 SIMD lanes:
- predicate 为
1的 lane 真正执行并写回; - predicate 为
0的 lane 被屏蔽; - ELSE 部分可以使用互补 predicate。
因此,如果一个 if-then-else 的两条路径长度相同,并且同一个线程组中一半线程走 THEN、一半线程走 ELSE,那么硬件通常需要分别执行两条路径。每次只有一部分 lane 有效,效率可能降到 50% 或更低。若出现两层等长嵌套分支,效率甚至可能降到约 25%。
branch synchronization stack 用于记录分歧和汇合信息。表项通常包含:
| 字段 | 作用 |
|---|---|
| identifier token | 标识当前分支上下文 |
| target address | 需要跳转或汇合的指令地址 |
| active mask | 哪些线程 lane 当前有效 |
简单外层 if-then-else 有时可以完全转成谓词指令;更复杂控制流则需要谓词、分支和同步栈配合。
5.6 GPU 内存
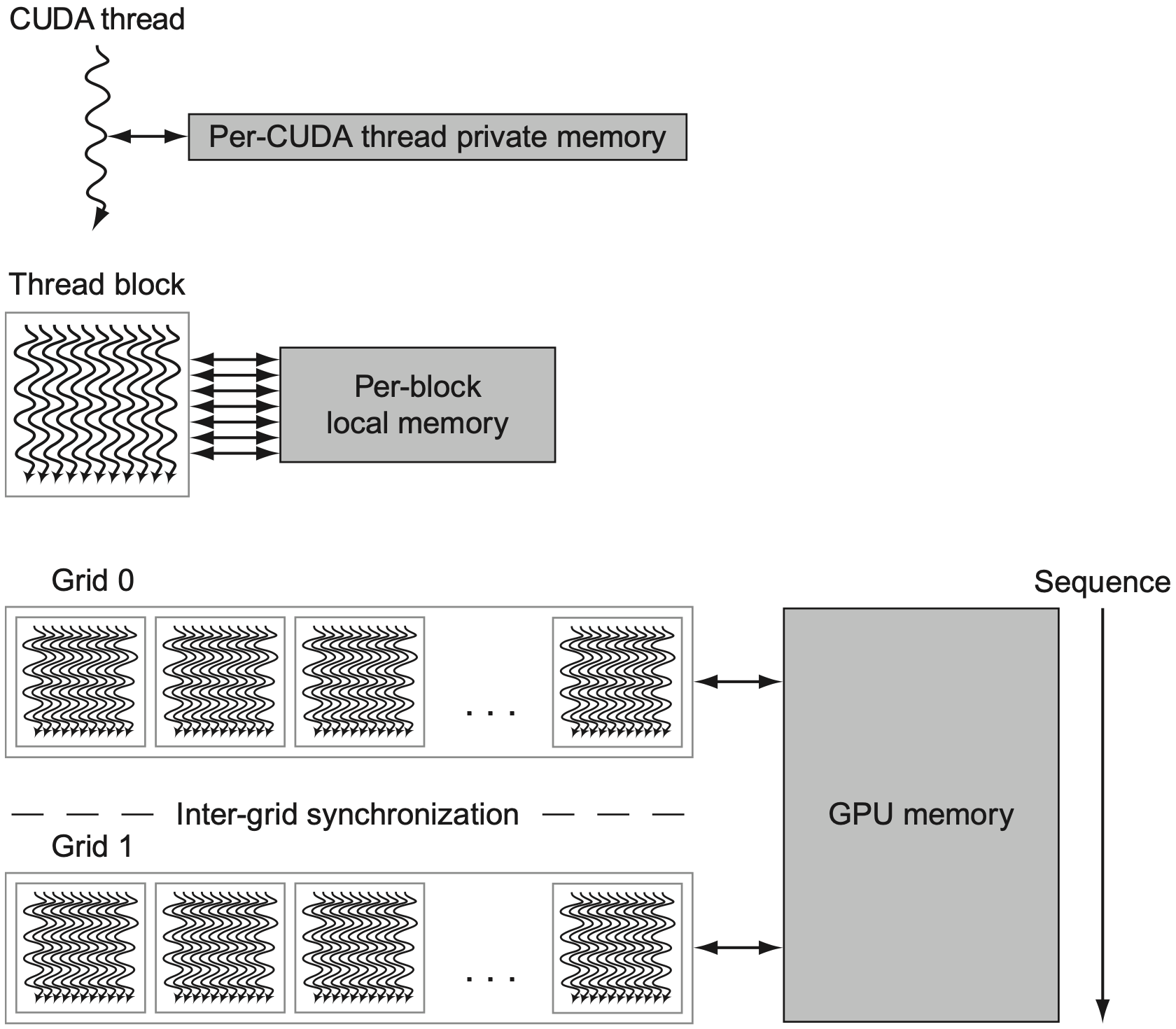
GPU 的内存层次与 CUDA 编程模型对应:
| 内存 | 作用范围 | 特点 |
|---|---|---|
| Private memory | 单个 CUDA thread | 每个线程私有 |
| Shared/local memory | 一个 thread block | block 内线程可共享 |
| Global GPU memory | 整个 GPU / 多个 grids | 容量大,但延迟高 |
shared memory 让同一个 block 内的线程可以协作,例如先把全局内存中的一块数据搬到 shared memory,再进行多次复用。global memory 容量更大,但访问延迟高,因此 GPU 依靠大量线程切换和合并访存来隐藏或摊薄延迟。
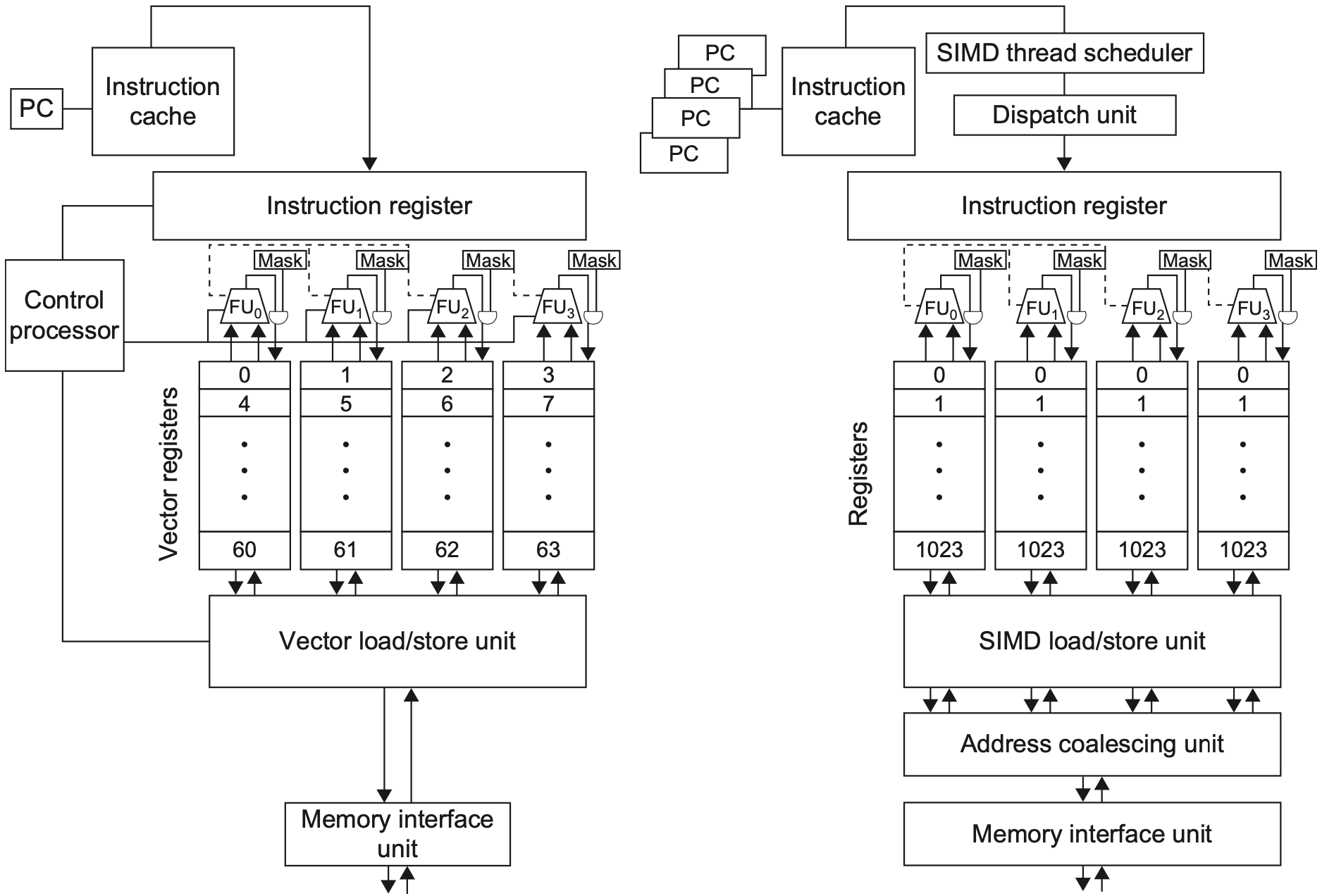
GPU 不是简单大向量机
向量机把并行性显式表达为向量指令和向量寄存器;GPU 把并行性表达为大量线程,再由硬件把线程组映射到 SIMD lanes 上。二者都利用 DLP,但暴露给程序员的抽象不同。
6. 架构对比
6.1 三类架构
向量架构、多媒体 SIMD 和 GPU 都利用数据级并行,但它们在抽象、硬件复杂度和适用场景上不同。
| 架构 | 程序抽象 | 优势 | 限制 |
|---|---|---|---|
| 向量架构 | 向量指令处理整组元素 | 支持 vl、stride、gather/scatter、mask,表达能力强 | 向量寄存器和访存系统复杂 |
| 多媒体 SIMD | 固定宽度短向量指令 | 简单、低成本,适合通用 CPU 扩展 | 边界处理和不规则访存较麻烦 |
| GPU | 大量 CUDA threads | 线程数巨大,吞吐高,适合大规模数据并行 | 分支发散和不规则访存会损失效率 |
可以把三者放在一条轴上理解:
- 多媒体 SIMD 最接近“短向量标量扩展”;
- 向量架构把向量长度、访存步长和掩码都纳入 ISA;
- GPU 则把向量元素进一步包装成线程,让硬件调度大量线程来隐藏延迟。
6.2 核心总结
本章的主线是:同一份数据级并行,可以被不同架构用不同方式表达。
向量架构依靠向量寄存器、向量功能单元、chaining、convoy、vl 和 strip mining,把循环中的许多独立迭代压缩成少数向量指令。它对连续数组和规则步长访问非常高效,也能通过 predicate 和 gather-scatter 处理条件执行与不规则布局。
多媒体 SIMD 是更轻量的方案。它保留“一条指令多个元素”的核心,但通常省略复杂向量机制,因此实现简单、适合通用处理器,不过需要软件额外处理尾部、mask 和非连续访问。
GPU 则把 DLP 表达为大量线程。CUDA 提供 thread、block、grid 的层次,GPU 硬件通过 SIMT、thread scheduler、大量寄存器上下文和多级内存来获得高吞吐。它特别适合规则、大规模、计算密集的数据并行任务;但分支发散、不规则访存和线程间通信都会削弱效率。
因此,DLP 优化的核心问题始终是三件事:让更多元素并行执行,让数据持续供给计算单元,并让控制流尽量规则。