Ch-14 数据索引
1. 索引基础
1.1 基本概念
索引 (Index) 是数据库为了加速数据访问而维护的辅助结构。没有索引时,系统可能需要扫描整个文件;有索引时,可以先根据查找条件定位到少量候选记录,再访问真实数据。
索引使用 搜索码 (Search Key) 查找记录。搜索码可以是一个属性,也可以是一组属性。索引文件由若干 索引项 (Index Entry) 组成,形式可以抽象为:
\[ \langle \text{search-key},\ \text{pointer} \rangle \]其中 pointer 指向记录、记录桶、数据块,或下一级索引节点。索引文件通常比原始数据文件小得多,因此先访问索引再访问数据,往往能显著减少 I/O。
1.2 评价指标
索引结构没有绝对最优,选择时通常看以下指标:
| 指标 | 关注点 |
|---|---|
| 访问类型 | 是否高效支持点查询、范围查询、排序扫描 |
| 访问时间 | 根据搜索码定位记录需要多少 I/O 或 CPU 时间 |
| 插入时间 | 新记录写入时维护索引的代价 |
| 删除时间 | 删除记录时维护索引的代价 |
| 空间开销 | 索引项、指针、空闲空间和辅助元数据占用多少空间 |
点查询 查找某个特定值,如 ID = 12345;范围查询 查找落在某个区间内的值,如 salary between 60000 and 90000。有序索引 天然适合范围查询,哈希索引 更适合等值查询。
1.3 索引类型
索引可以先分成两大类:
| 类型 | 组织方式 | 适用场景 |
|---|---|---|
| 有序索引 (Ordered Index) | 搜索码按排序顺序存储 | 范围查询、顺序扫描、排序访问 |
| 哈希索引 (Hash Index) | 搜索码通过哈希函数分布到桶中 | 等值查找 |
有序索引中还需要区分主索引和辅助索引:
- 主索引 (Primary Index) 的搜索码决定文件中记录的顺序,也称聚集索引 (Clustering Index)。搜索码不一定是主键但通常是主键。
- 辅助索引 (Secondary Index) 的搜索码顺序与数据文件物理顺序不同,也称非聚集索引 (Non-Clustering Index)。
顺序文件按照主索引组织,就称为 索引顺序文件 (Index-Sequential File)。它结合了顺序文件的范围扫描能力和索引定位能力,但随着插入删除增加可能产生溢出块,需要周期性重组。
2. 顺序索引
2.1 稠密索引
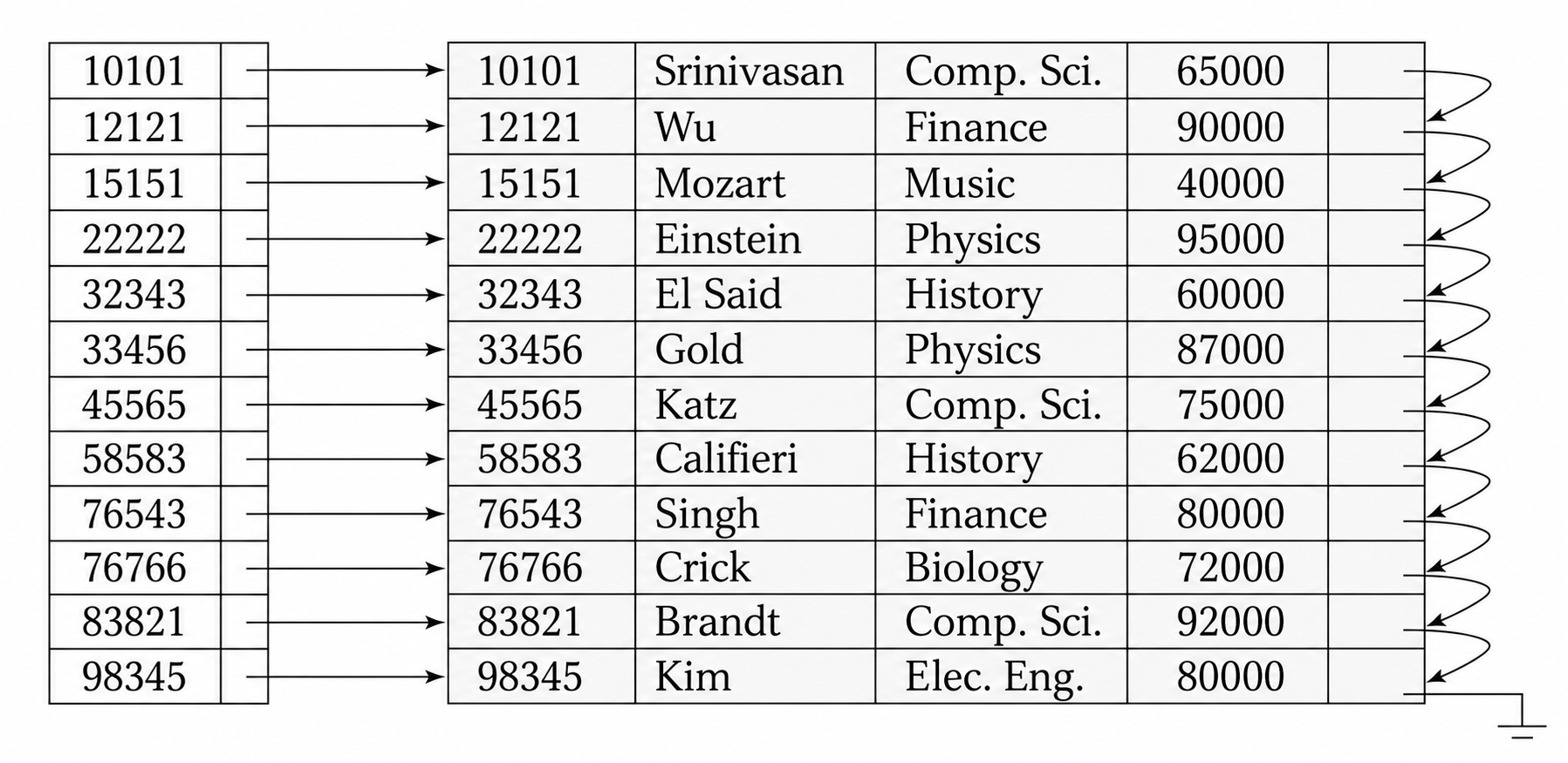
稠密索引 (Dense Index) 为文件中的每个搜索码值都建立索引项。若搜索码唯一,则每个索引项指向一条记录;若搜索码不唯一,则索引项可以指向一个记录桶,桶中保存所有具有该搜索码值的记录指针 (下图中由于按索引码排序,索引项可以直接指向第一个满足条件的记录)。
稠密索引查找速度快,因为索引中直接覆盖所有搜索码值。但它的空间开销和维护开销也更高:插入新搜索码值时要插入索引项,删除最后一个具有某搜索码值的记录时也要删除索引项。
2.2 稀疏索引
稀疏索引 (Sparse Index) 只为部分搜索码值建立索引项。它要求数据文件本身已经按照搜索码顺序排列,否则无法从一个索引项开始顺序扫描到目标记录。
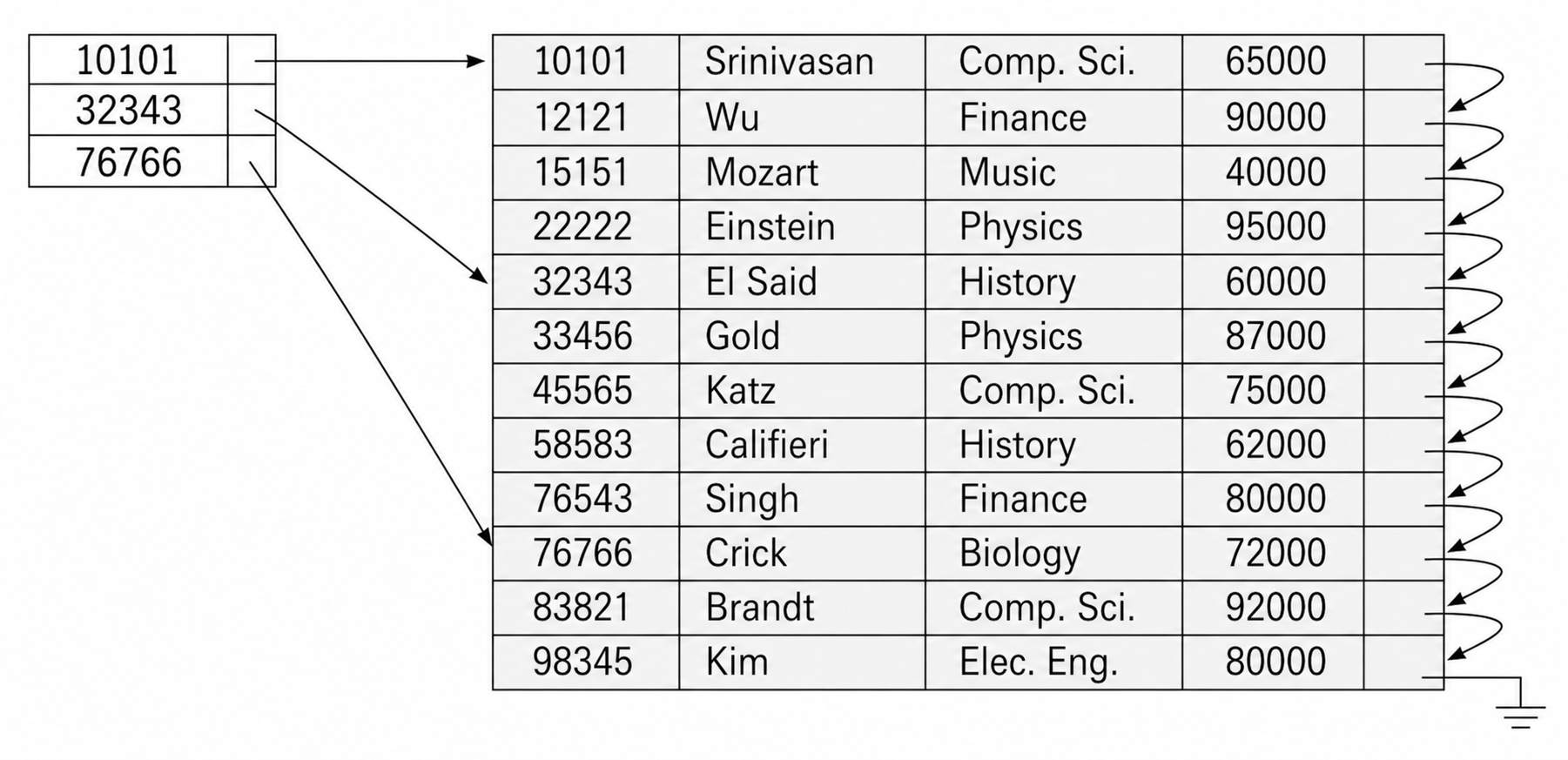
查找搜索码值 K 时,稀疏索引的过程是:
- 在索引中找到小于或等于
K的最大搜索码值。 - 沿该索引项指向的数据位置开始顺序扫描。
- 扫描到目标记录,或发现目标不存在。
稀疏索引比稠密索引更省空间,插入删除时维护成本也更低;代价是定位记录后还要顺序扫描一段数据。常见折中是 每个数据块建立一个索引项,索引项对应块中的最小搜索码值,这样处理,定位到记录后只需要在块内顺序查找即可,能够减少块传输次数。
2.3 多级索引
如果主索引本身太大,无法放入内存,那么每次查找都需要访问磁盘上的索引块,代价仍然较高。解决方法是把磁盘上的主索引也看成一个顺序文件,再在它上面建立稀疏索引。
这样形成 多级索引 (Multilevel Index):
- 内层索引 (Inner Index):直接指向数据文件的主索引。
- 外层索引 (Outer Index):建立在内层索引之上的稀疏索引。
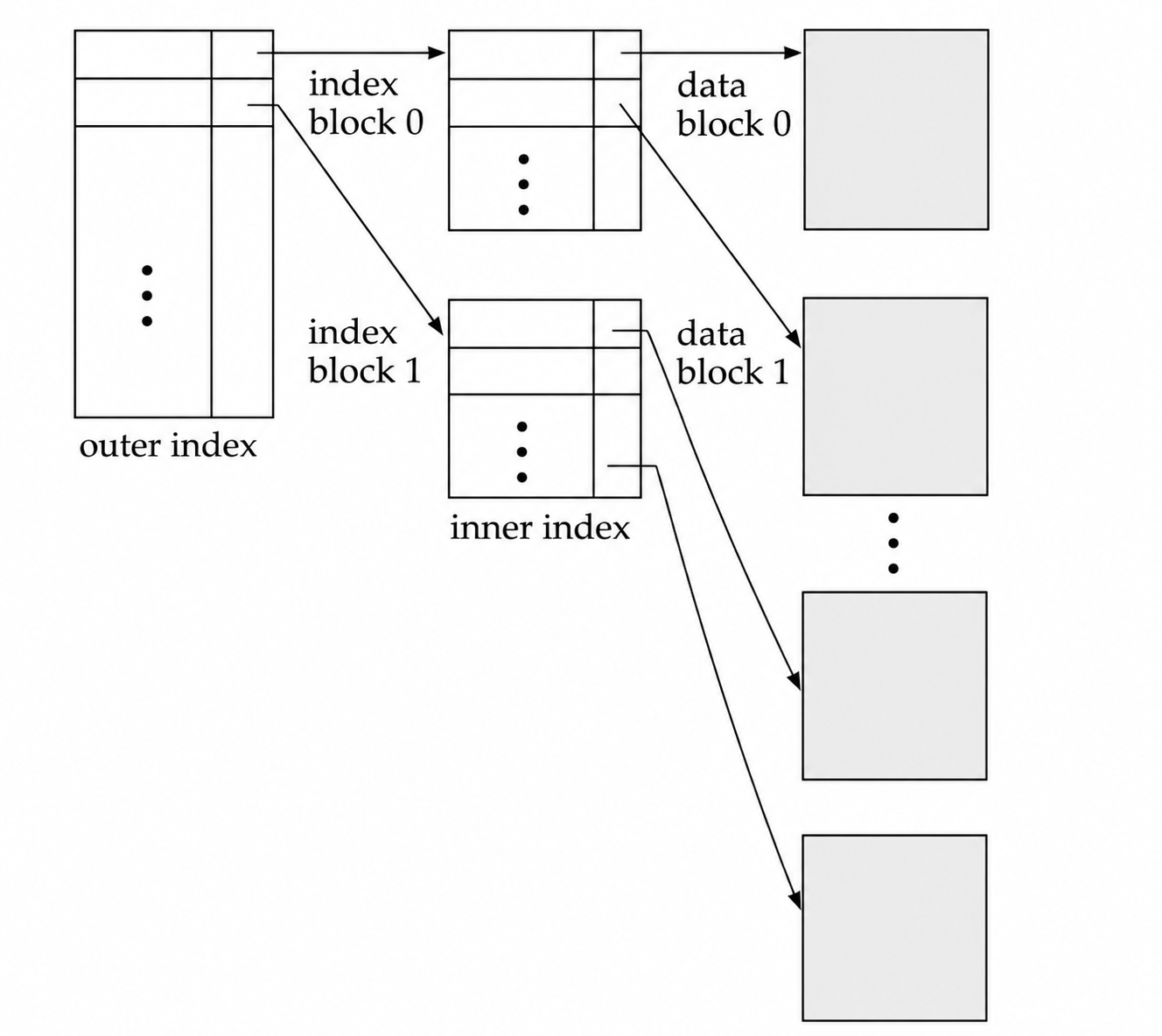
如果外层索引仍然太大,可以继续建立更高层索引。多级索引减少了查找时需要扫描的索引块数量,但插入和删除必须更新所有相关层级。
2.4 聚集差异
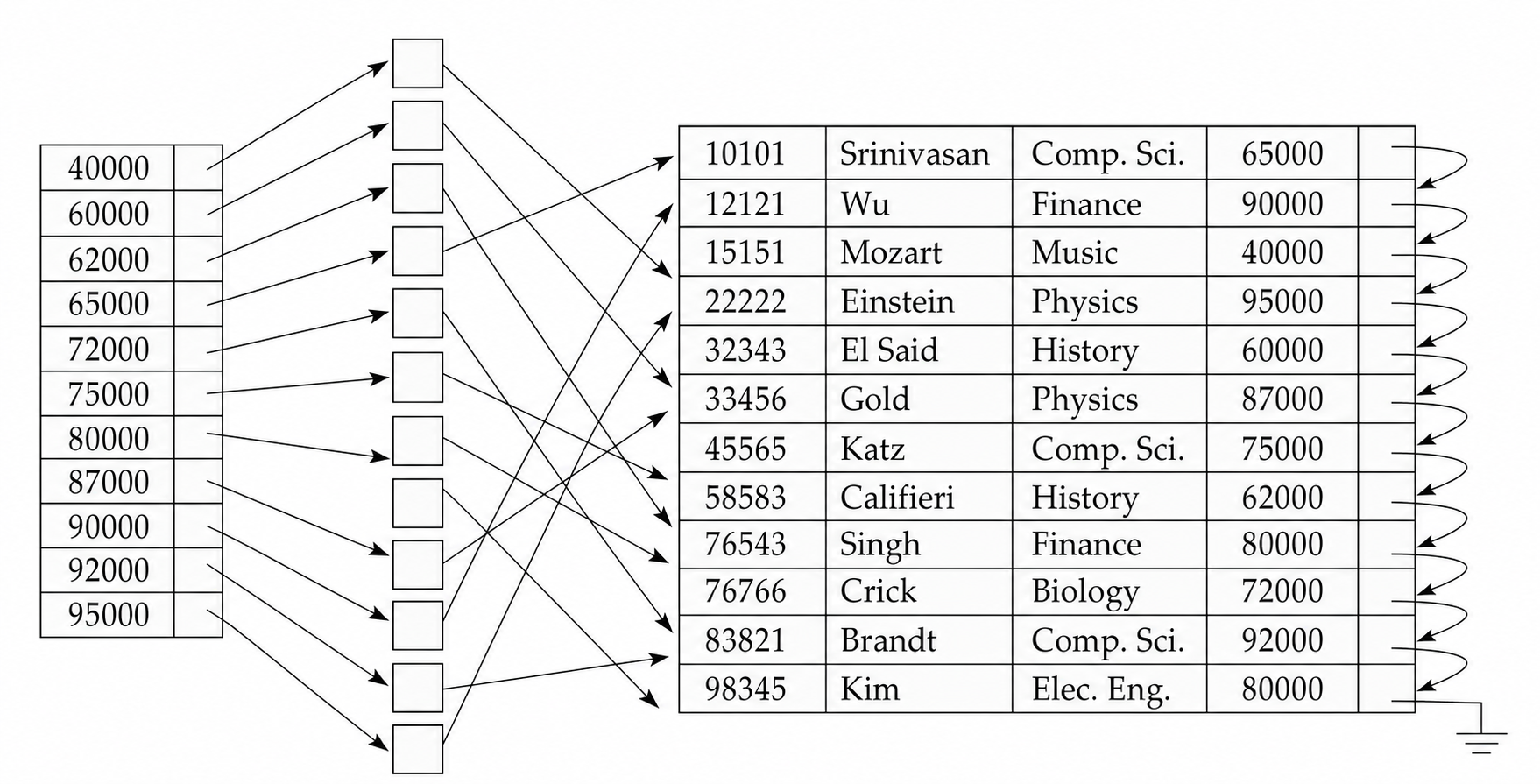
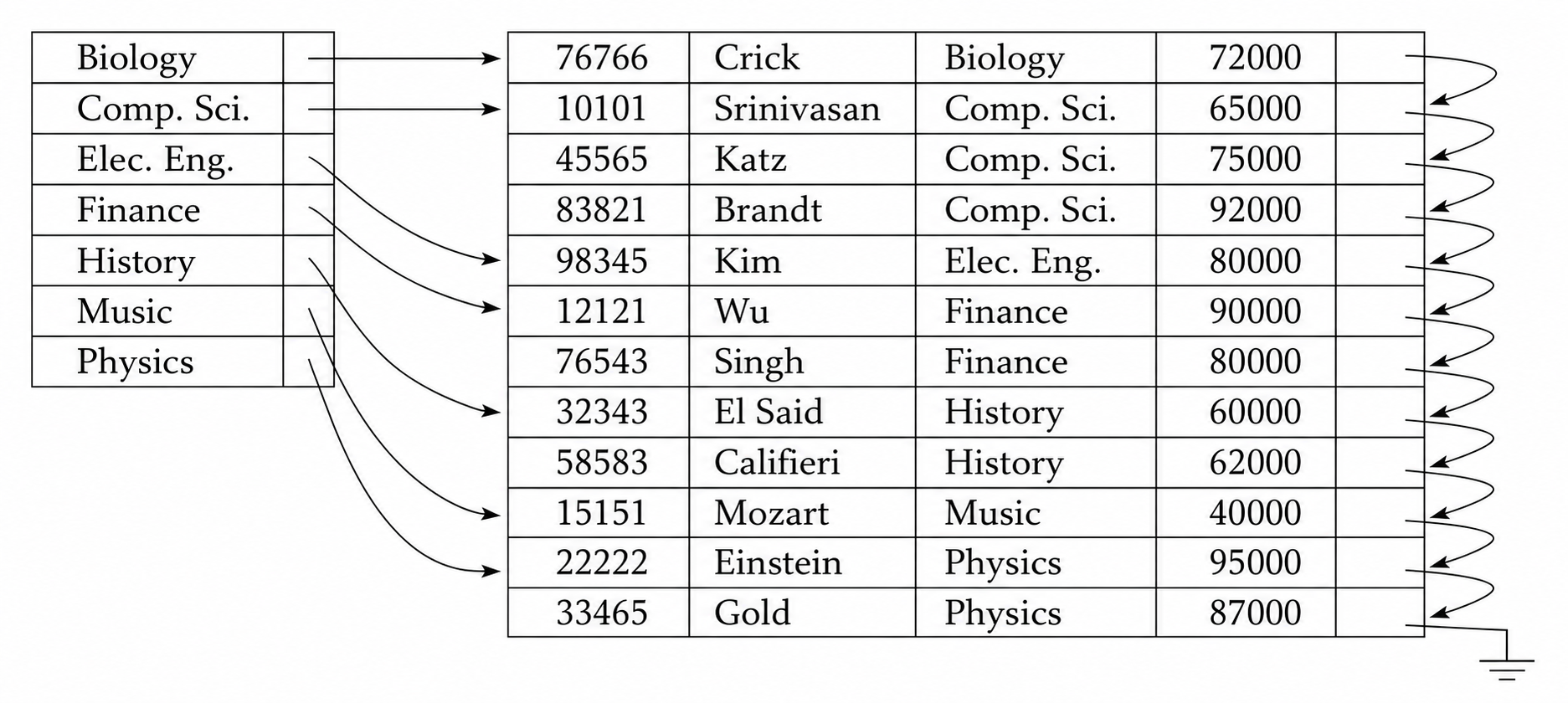
主索引通常是聚集索引,记录顺序和搜索码顺序一致,范围查询可以顺序读取连续数据块。辅助索引通常是非聚集索引,索引项顺序和记录物理顺序不同,范围查询可能产生大量随机 I/O。
| 索引类型 | 点查询 | 范围查询 | 插入删除 |
|---|---|---|---|
| 稠密主索引 | 快 | 快,顺序扫描友好 | 索引项多,维护较多 |
| 稀疏主索引 | 较快 | 快,适合块级索引项 | 空间和维护较省 |
| 稠密辅助索引 | 快 | 可能随机访问大量记录 | 记录移动时维护复杂 |
如果辅助索引直接保存记录物理指针,那么记录移动会导致所有相关辅助索引都要更新。一个常见办法是在辅助索引中保存主索引搜索码,而不是物理记录指针。这样记录移动时辅助索引不必修改,但查询需要先走辅助索引,再走主索引定位真实记录。
3. B+树
3.1 结构性质
B+ 树索引 (B+ Tree Index) 是数据库中最常用的有序索引结构。它较传统索引顺序文件的优势是:在插入和删除时,B+ 树能通过局部拆分和合并保持平衡,不需要周期性重组整个文件。
一棵阶数为 \(n\) 的 B+ 树满足:
- 从根到所有叶子的路径 长度相同
- 非根、非叶内部节点有 \(\lceil n/2 \rceil\) 到 \(n\) 个子节点
- 叶节点有 \(\lceil (n-1)/2 \rceil\) 到 \(n-1\) 个搜索码值
- 如果根不是叶子,根至少有 \(2\) 个子节点
- 如果根是叶子,根可以有 \(0\) 到 \(n-1\) 个搜索码值
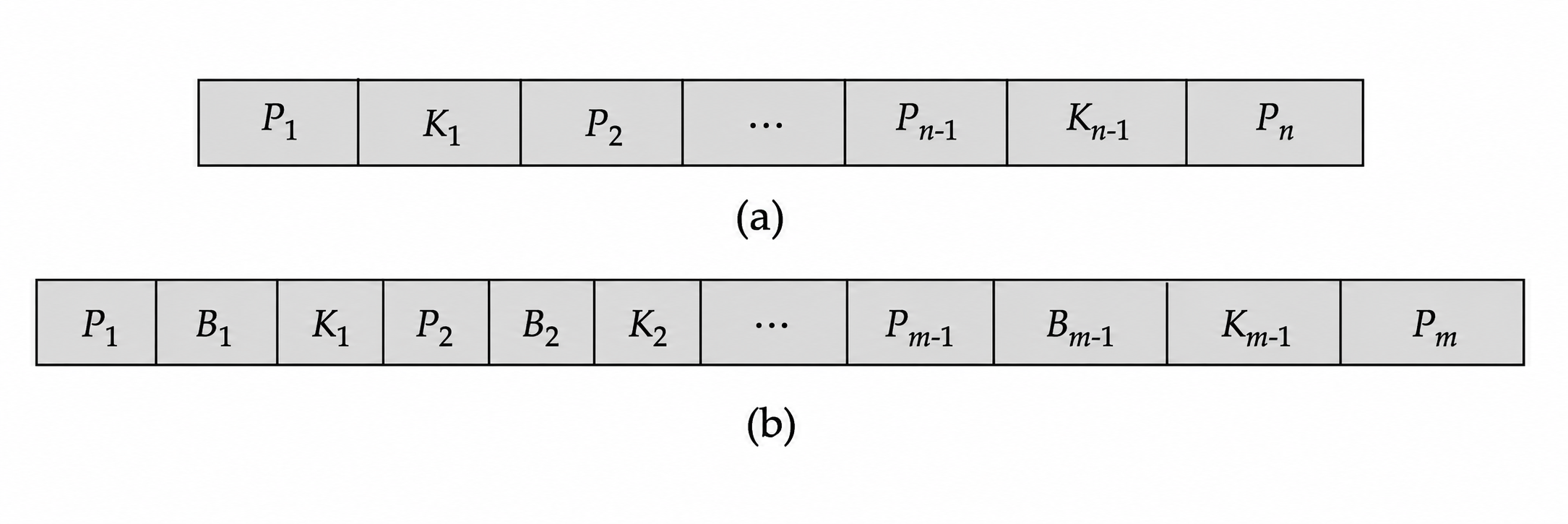
典型节点结构可以写成:
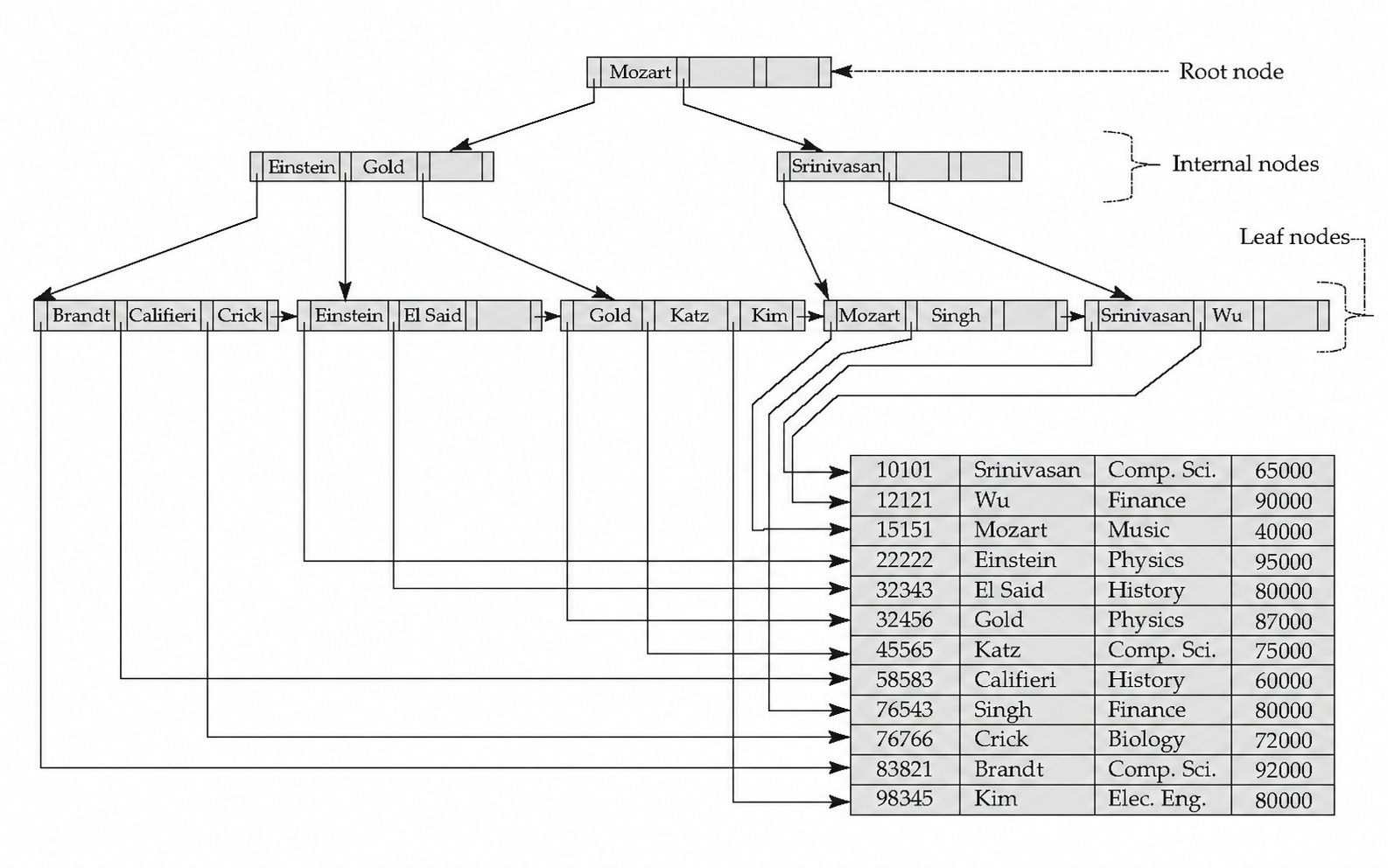
\[ P_1,\ K_1,\ P_2,\ K_2,\ \ldots,\ P_{n-1},\ K_{n-1},\ P_n \quad(K_1<K_2<\cdots<K_{n-1}) \]其中 \(K_i\) 是搜索码值,\(P_i\) 是指针。内部节点中的指针指向子节点;叶节点中的指针指向记录或记录桶。叶节点还通过额外指针按搜索码 顺序串联,方便范围扫描。
3.2 节点性质
B+ 树的内部节点构成叶节点之上的 多级稀疏索引。对一个有 \(m\) 个指针的内部节点:
- \(P_i\) 指向的子树中,所有搜索码值小于 \(K_i\)
- \(P_i\) 指向的子树中,搜索码值满足 \(K_{i-1} \leq K < K_i\)
- \(P_m\) 指向的子树中,搜索码值大于或等于 \(K_{m-1}\)
叶节点保存实际的索引项。如果叶节点 \(L_i\) 位于 \(L_j\) 左侧,那么 \(L_i\) 中的搜索码值都小于等于 \(L_j\) 中的搜索码值。范围查询可以先定位第一个叶节点,然后沿链表顺序读取后续叶节点。
Note
B+ 树中所有真实数据入口都在叶子层,内部节点主要负责导航。这一点和 B 树不同,B 树允许搜索码值只出现在内部节点中。
3.3 查询过程
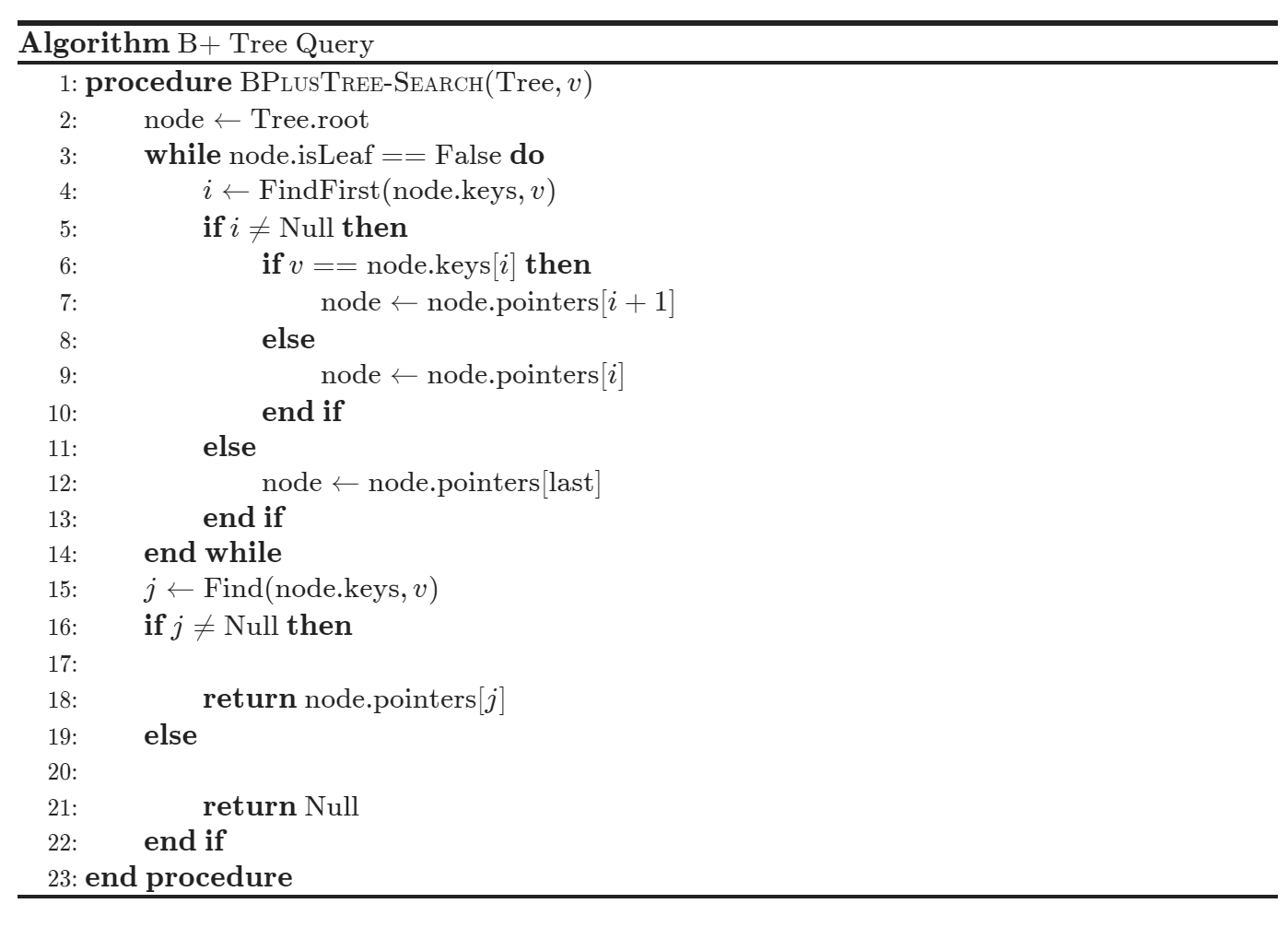
B+ 树查找搜索码值 \(v\) 时,从根节点开始向下:
- 在当前节点中找到最小的 \(K_i\),使得 \(v \leq K_i\),若不存在则沿最后一个非空指针向下
- 如果 \(v = K_i\),内部节点中通常沿 \(P_{i+1}\) 向下;否则沿 \(P_i\) 向下
- 到达叶节点后,在叶节点中查找 \(v\),若存在则沿对应指针访问记录
若文件中有 \(K\) 个搜索码值,树高 至多 约为:
\[ \left\lceil \log_{\lceil n/2 \rceil}(K) \right\rceil \]数据库中一个 B+ 树节点通常设计为一个磁盘块大小 4KB。若一个索引项约 40 字节,\(n\) 可以接近 100。对于 100 万个搜索码值,查找最多访问约 4 个节点;相比平衡二叉树约 20 层可以显著减少磁盘 I/O。
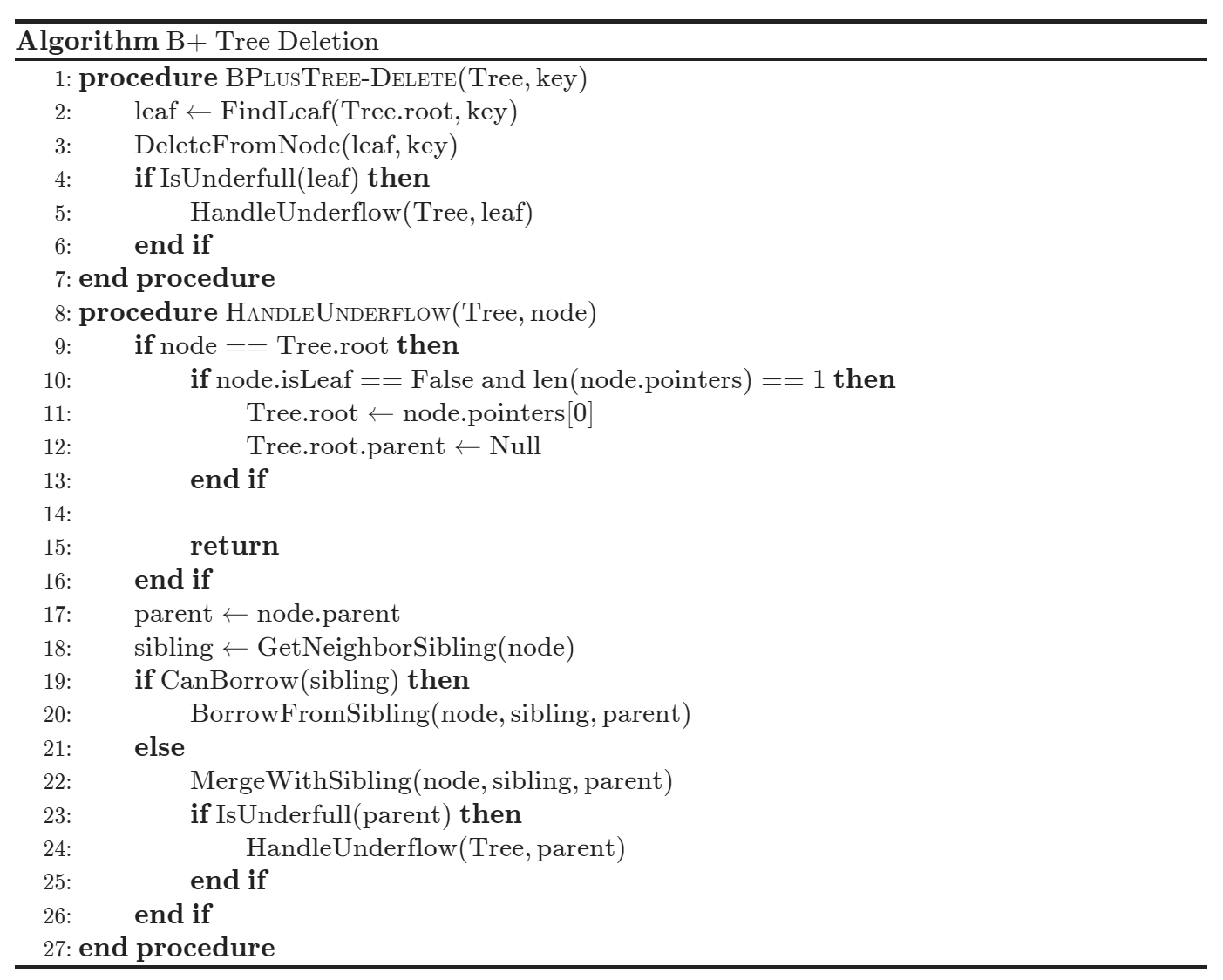
3.4 插入删除
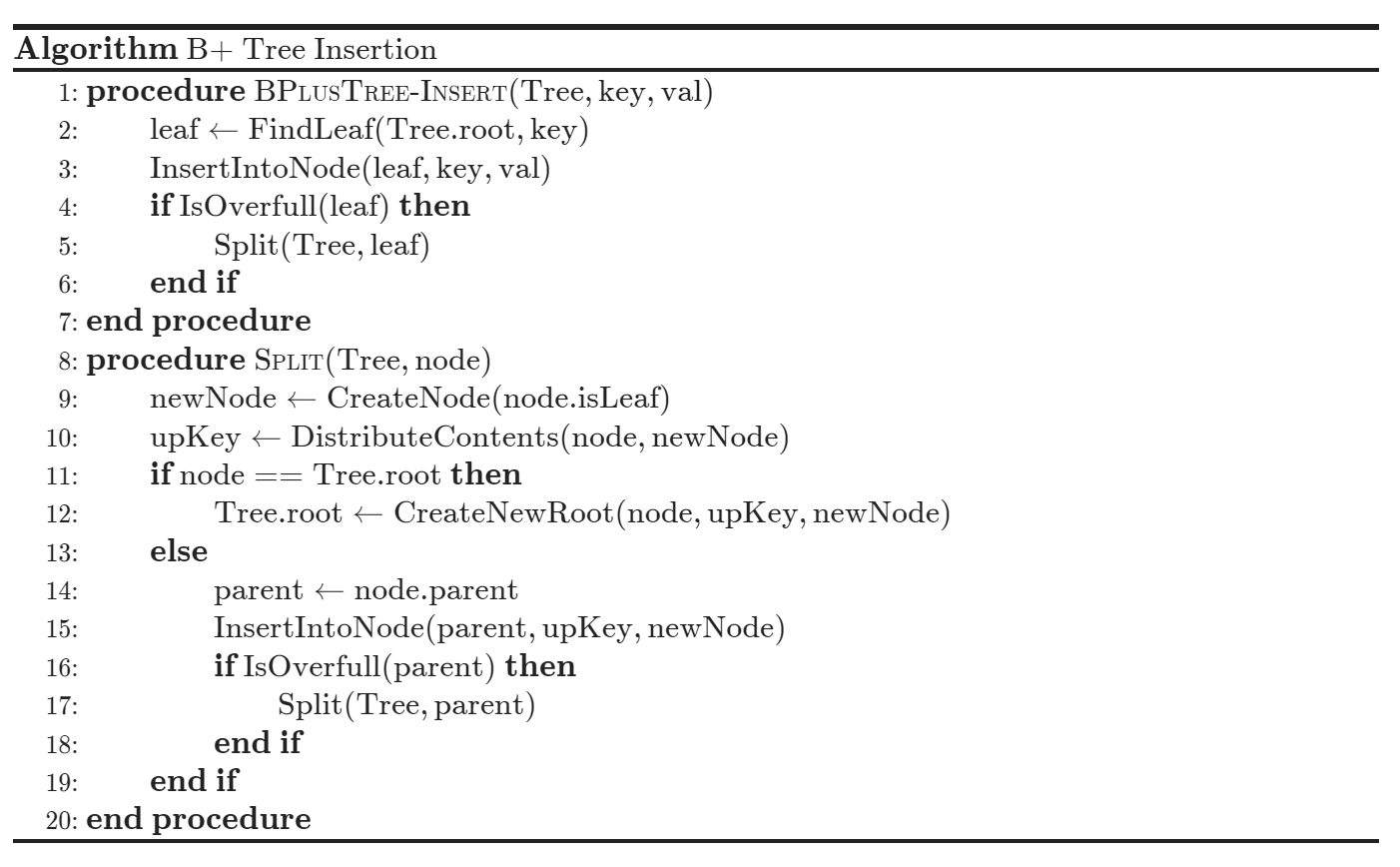
B+ 树 插入 \((v, p)\) 时,先找到应出现的叶节点:
- 如果叶节点还有空间,直接按顺序插入。
- 如果叶节点已满,把原有 \(n-1\) 个索引项和新索引项排序后分裂
- 前半部分留在原节点,后半部分放入新节点
- 把新节点的最小搜索码值和新节点指针插入父节点
- 如果父节点也满,继续向上分裂;最坏情况下根分裂,树高增加 \(1\)
删除 时先从叶节点移除对应索引项:
- 如果节点仍满足最小占用要求,结束。
- 如果节点过少,先看能否和兄弟节点重新分配索引项。
- 若重新分配后两边都能满足最小占用,更新父节点分隔搜索码。
- 若两个节点合并后能放入一个节点,则合并兄弟节点,并从父节点删除对应指针。
- 删除可能向上级联;如果根只剩一个子节点,可以删除根,让唯一子节点成为新根。
插入和删除的最坏 I/O 复杂度与 树高 成正比,即:
\[ \mathcal{O}\!\left(\log_{\lceil n/2 \rceil}(K)\right) \]实际系统中内部节点常驻缓冲区,分裂和合并也不频繁,因此多数更新只影响叶节点。
3.5 大小估算
B+ 树估算的核心是节点容量和树高。以 person 关系为例:
person(
pid char(18) primary key,
name char(8),
age smallint,
address char(40)
)记录大小约为 \(18 + 8 + 2 + 40 = 68\) 字节。
若块大小为 4KB,则每个数据块约能存:\(\begin{align}\left\lfloor \frac{4096}{68} \right\rfloor = 60\end{align}\)条记录。
100 万条记录大约需要:\(\begin{align}\left\lceil \frac{1000000}{60} \right\rceil = 16667\end{align}\) 个数据块。
搜索码 18 字节,指针 4 字节,内部节点扇出估算为:\(\begin{align}n = \left\lfloor \frac{4096 - 4}{18 + 4} \right\rfloor + 1 = 187\end{align}\) 。
这说明 B+ 树高度通常很小。即使数据量达到百万级,三到四层往往已经足够。
假设索引的大小为 \(m\) bytes,则 内部节点 扇出的估计为 \(n=\begin{align}\left\lfloor\frac{4096-4}{m+4}\right\rfloor+1\end{align}\) 。
3.6 文件组织
B+ 树文件组织 (B+ Tree File Organization) 把记录本身存放在叶节点中,而不是只在叶节点保存记录指针。这样即使有插入、删除和更新,记录仍能按搜索码聚集,范围查询仍可以沿叶节点顺序扫描。
由于记录比指针大得多,叶节点能容纳的记录数少于内部节点能容纳的指针数。空间利用率变得更重要,系统可以在分裂和合并时引入更多兄弟节点参与重新分配,减少半满节点带来的空间浪费,例如可以在叶节点 \(A\) 存满时不立即分裂,而是优先将一部分记录转移到兄弟节点上。
3.7 B 树比较
B 树 (B Tree) 与 B+ 树相似,但搜索码值只出现一次;如果搜索码在内部节点中出现,就不再出现在叶节点中。因此 B 树减少了一些重复搜索码存储,也可能在到达叶节点前找到目标值。
| 方面 | B 树 | B+ 树 |
|---|---|---|
| 索引项位置 | 可在内部节点或叶节点 | 统一在叶节点 |
| 内部节点大小 | 需要保存额外记录指针,扇出较小 | 内部节点只导航,扇出较大 |
| 范围查询 | 需要更复杂遍历 | 叶子链表顺序扫描简单 |
| 更新实现 | 插入删除更复杂 | 更容易实现和维护 |
4. 复合索引
4.1 字符串搜索码
字符串作为搜索码时,长度可变会导致节点扇出可变。此时分裂节点不能只看指针数量,还要看空间利用率,当节点页内的剩余可用字节数不足以容纳新插入的索引项时,就会触发节点分裂。
前缀压缩 (Prefix Compression) 可以减少字符串索引占用。内部节点中的搜索码不一定保存完整字符串,只要保留足够区分相邻子树的前缀即可。例如 Silas 和 Silberschatz 可以用 Silb 分隔。叶节点也可以通过共享公共前缀压缩多个搜索码。
4.2 复合搜索码
查询可能同时涉及多个条件。例如:
select ID
from instructor
where dept_name = 'Finance'
and salary = 80000;如果只有 单属性索引,可以选择:
- 用
dept_name索引找出Finance系教师,再检查salary = 80000。 - 用
salary索引找出工资为 80000 的教师,再检查dept_name = 'Finance'。 - 分别用两个索引得到记录指针集合,再取交集。
这些方法都可能读取大量只满足部分条件的记录。若查询模式稳定,建立复合索引更合适。
复合搜索码 (Composite Search Key) 由多个属性组成,通常按字典序排序:
\[ (\text{a}_1,\ \text{a}_2) < (\text{b}_1,\ \text{b}_2) \quad\text{iff}\quad \text{a}_1 < \text{b}_1\lor (\text{a}_1 = \text{b}_1 \ \land\ \text{a}_2 < \text{b}_2) \]以索引 (dept_name, salary) 为例,它能高效支持:
where dept_name = 'Finance' and salary = 80000
where dept_name = 'Finance' and salary < 80000但它不能高效支持:
where dept_name < 'Finance' and salary = 80000原因是复合索引首先按 dept_name 排序。只有前导属性被等值限定时,后续属性的有序性才容易被利用,否则依旧需要顺序遍历进行查询。
4.3 非唯一搜索码
如果搜索码 \(a_i\) 不唯一,可以把它扩展成唯一复合搜索码 \((a_i, A_p)\),其中 \(A_p\) 可以是主键、记录 ID 或其他能保证唯一性的属性。例如,查找 \(a_i = v\) 可以转化为复合搜索码范围查询:
\[ (\text{v},\ -\infty) \ \text{到}\ (\text{v},\ +\infty) \]这种方法会增加搜索码存储空间,但 简化插入和删除逻辑。若索引是聚集索引,范围内记录访问通常是顺序的;若索引是非聚集索引,每条记录访问可能都需要一次随机 I/O。
4.4 主存索引
主存中的随机访问远比磁盘便宜,但仍然比缓存访问昂贵。大型 B+ 树节点中用二分查找定位搜索码,可能产生多个缓存未命中。因此主存索引需要更关注缓存友好性。
一种思路是:磁盘层面使用大节点减少 I/O,节点内部再用适合缓存行的小结构组织搜索码,而不是简单线性数组。这样既保留 B+ 树的高扇出,又减少 CPU 缓存开销。

假设在 4KB 的页(存有 256 个搜索码)中查找一个值:
- 二分查找:内存地址跳转幅度过大,除了最后几次跳转可能在同一缓存行中,几乎每次跳转都会引发一次缓存失效,全程平均会产生 6~8 次 Cache Miss。
- 微型树查找:第一步读取 64B 根节点并在缓存中定位内部节点,第二步加载 64B 内部节点定位目标叶节点,第三步直接加载 64B 目标叶节点获取结果,仅产生 3 次 Cache Miss。
5. 专用索引
5.1 批量装载
逐条向 B+ 树插入大量索引项很低效。如果叶子层不能放入内存,几乎每条插入都可能产生 I/O。批量装载 (Bulk Loading) 的核心是先排序,再自底向上构建树。
| 方法 | 做法 | 特点 |
|---|---|---|
| 排序后顺序插入 | 先用外部排序得到有序索引项,再按顺序插入 | I/O 明显改善,但叶节点可能半满 |
| 自底向上构建 | 先排序再从叶子层开始逐层生成 B+ 树 | 多数数据库采用,写入更顺序 |
自底向上构建能用顺序 I/O 写出新树,适合初始化索引或批量合并索引。
5.2 Flash 索引
在 Flash 存储上,随机读写延迟远低于磁盘,但写入不是原地覆盖,最终还涉及更昂贵的擦除操作,因此 Flash 上的最优页大小通常小于磁盘页。
- 批量装载仍然重要,因为它能减少页面擦除和随机写,从而延长 Flash 的使用寿命
- 写优化结构也适合 Flash,把大量小写入转换成顺序写入或批量合并,减少写磨损
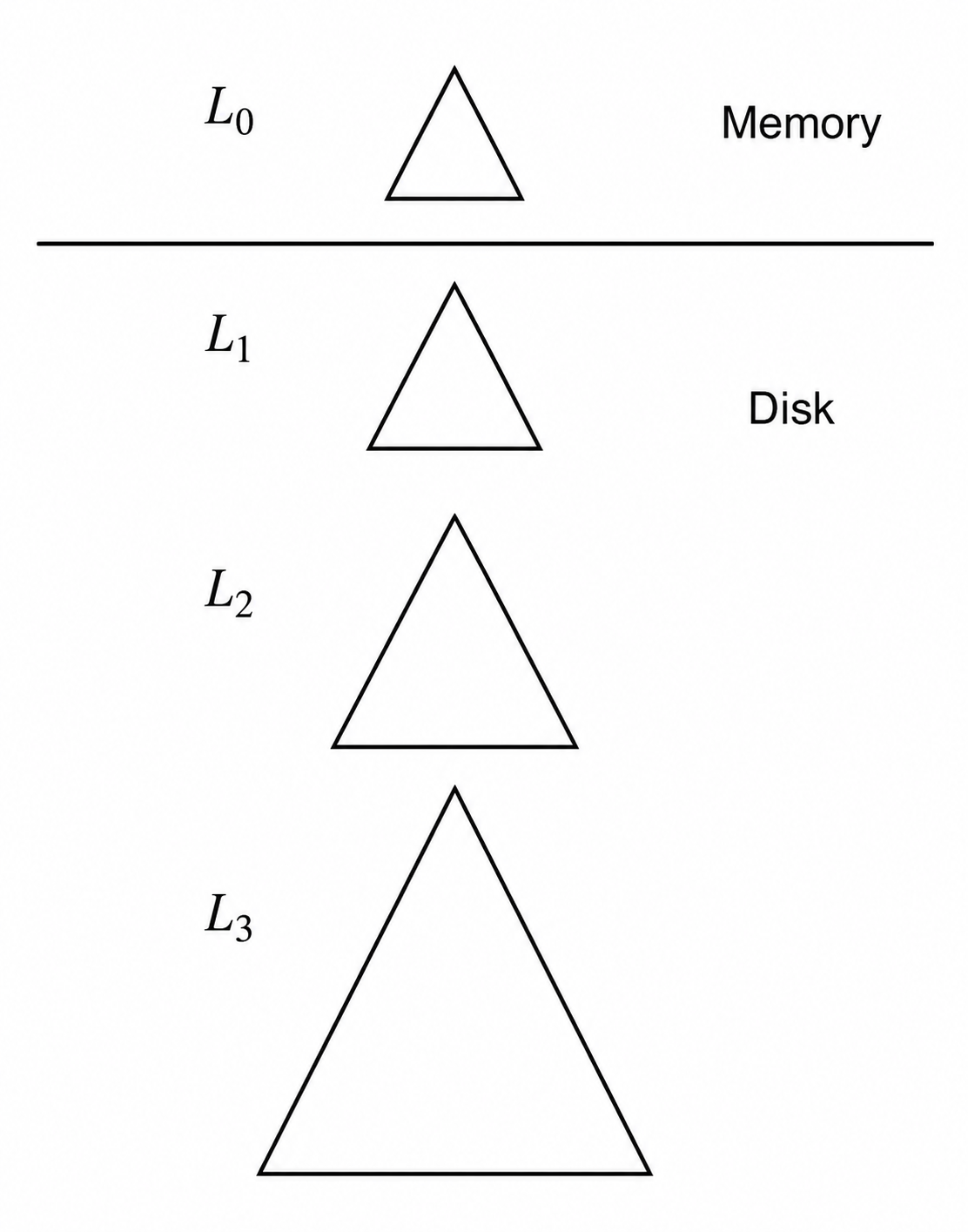
5.3 LSM 树
普通 B+ 树面对写密集负载时表现可能较差。即使内部节点都在内存中,每次插入仍可能修改一个叶节点。日志结构合并树 (Log-Structured Merge Tree) 通过分层合并降低写入成本。
LSM 的基本过程是:
- 新记录优先插入内存中的 \(L_0\) 树:数据写入内存中以跳表等结构维持搜索码有序,并同步追加写入磁盘的预写日志(WAL)以保障数据的持久化。
- \(L_0\) 满后批量写入磁盘上的 \(L_1\) 树:由后台线程将内存数据与磁盘现有的 \(L_1\) 数据进行双路归并排序,采用大块顺序写入的方式在磁盘生成新的 \(L_1\) 树。
- 当 \(L_1\) 超过阈值时与更低层合并成 \(L_2\):触发合并机制,读取两层中搜索码重叠的部分并在内存中归并,清理掉旧版本数据和删除标记,最后顺序写回 \(L_2\)。
- 后续层级继续按阈值合并:通常 \(L_{i+1}\) 的大小阈值是 \(L_i\) 的 \(k\) 倍,倍数 \(k\) 通常设为 10,通过各层容量的指数级递增来控制总层数,以此限制查询时的读放大并让冷数据有序下沉。
LSM 的 优点 是插入主要使用顺序 I/O,叶节点空间利用率高写入成本低。缺点 是查询可能需要查多个层级;由于层级合并,每个层级的全部内容可能会被多次复制。
阶梯合并索引 (Stepped-Merge Index) 在每个磁盘层级保留多个树,满 \(k\) 个后再合并到下一层。它进一步减少了合并的频率,降低写成本,但查询需要检查更多树,导致读操作更加昂贵。对于点查询,可以在内存中为每一个树计算存储一个 布隆过滤器 (Bloom filter) ,在进行查询时,先通过布隆过滤器判断,只有在过滤器返回“可能存在”时才去查询对应的树,从而避免了大部分无意义的磁盘 I/O。
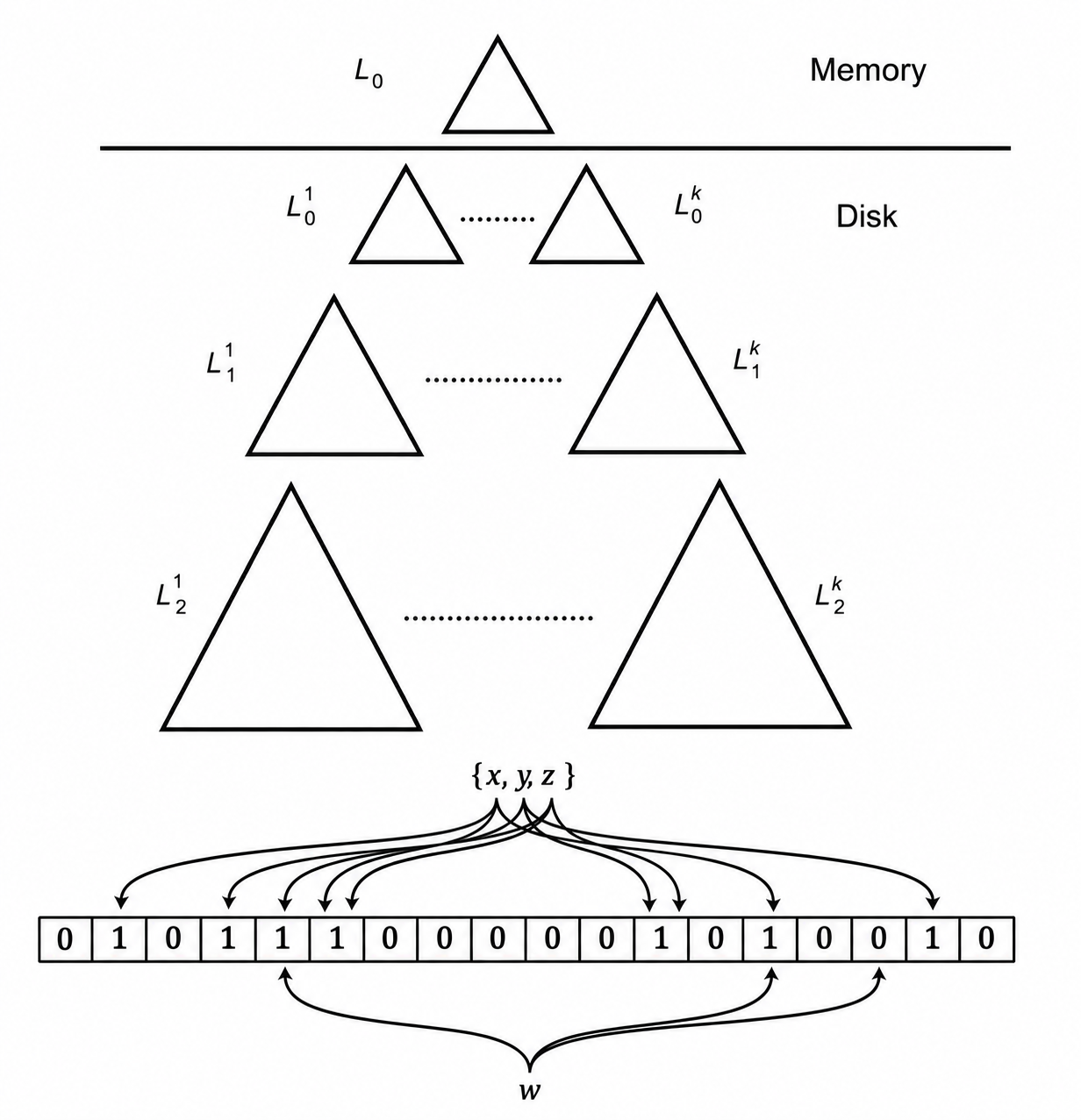
布隆过滤器由一个 比特数组 和多个 哈希函数 组成。将元素通过多个哈希函数计算,把得到的比特数组位置全部设为 \(1\) ,将要查询的元素 \(w\) 进行相同的哈希计算,检查对应位置的值,只要有任意一位为 \(0\) ,则该元素一定不存在,若所有位均为 \(1\) 则可能存在。
5.4 Buffer 树
Buffer Tree 的思想是在 B+ 树内部节点中加入缓冲区存放插入请求。当缓冲区满时,再把一批记录一起推送到下一层。每次批量移动多条记录,可以摊薄单条记录的 I/O 成本。
Buffer Tree 的查询开销通常小于 LSM,因为它仍保留较接近普通树索引的结构;但它比 LSM 更容易产生随机 I/O。它适合作为通用树索引结构的写优化扩展。
Buffer 树如何处理查询
- 即时查询:从根向叶节点检索时,会沿途扫描每个节点的 Buffer。越靠上层的数据越新,系统会将路径中搜集到的最新修改与叶节点数据合并,从而获取最新的状态。
- 批量查询:查询操作本身也被作为记录塞进 Buffer 中排队。像普通数据一样随着缓冲区填满被向下推送,直到最终抵达叶节点时,才统一读取并返回结果。
5.5 位图索引
位图索引 (Bitmap Index) 适合取值种类较少的属性,例如 gender、country、state 或离散化后的 income_level。假设关系中的记录按 0, 1, 2, ... 编号,每个属性值对应一个位图;若第 \(i\) 条记录具有该值,则位图第 \(i\) 位为 \(1\),否则为 \(0\)。
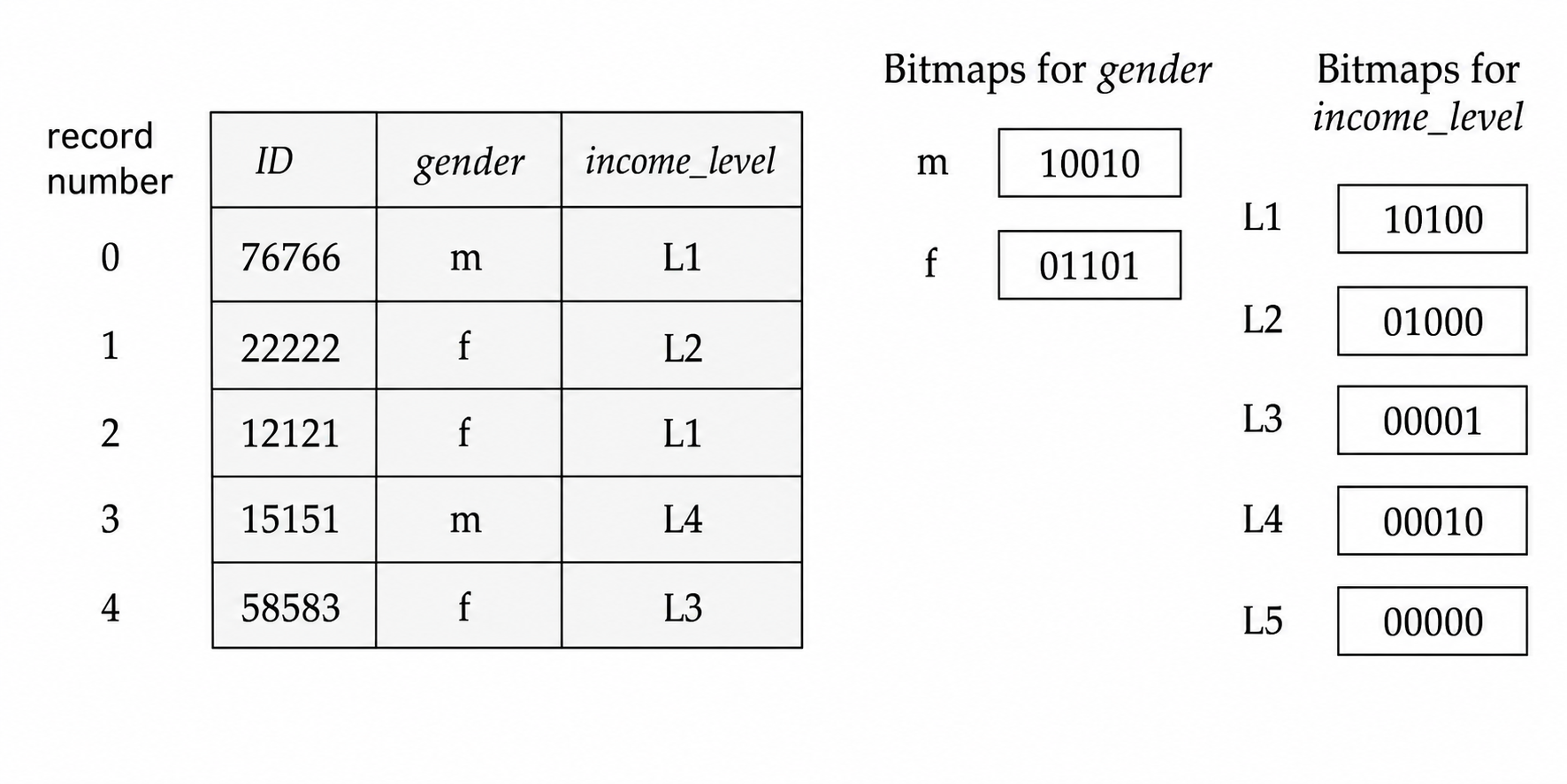
位图索引特别适合多属性组合查询,因为交、并、非都可以用按位运算完成。例如:
\[ 100110\ \text{AND}\ 110011 = 100010 \]\[ 100110\ \text{OR}\ 110011 = 110111 \]\[ \text{NOT}\ 100110 = 011001 \]若要查找 gender = 'm' 且 income_level = 'L1' 的记录,只需把对应两个位图做 AND,再根据结果中为 \(1\) 的位置读取记录。
位图通常很小。如果一条记录 \(100\) 字节,一个单独位图只占关系大小的 \(1/800\)。若属性只有 \(8\) 个不同取值,全部位图也约为关系大小的 \(1\%\)。位图还可以按机器字打包,CPU 一条按位指令能同时处理 \(32\) 或 \(64\) 位;统计匹配记录数时,可以用预计算表快速计算每个字节中 \(1\) 的个数。