Ch-18 并发控制
1. 锁协议
1.1 锁的模式
锁 (Lock) 是数据库系统控制并发访问的基本机制。事务在访问某个数据项之前先向并发控制管理器申请锁,只有申请被批准后才能继续执行。最基本的锁有两种模式:
| 锁模式 | 含义 | 典型指令 |
|---|---|---|
| 共享锁 (Shared Lock, S) | 事务只能读取数据项。多个事务可以同时持有同一数据项的共享锁。 | lock-S(Q) |
| 排他锁 (Exclusive Lock, X) | 事务可以读取并修改数据项。只要某事务持有排他锁,其他事务不能再持有该项上的任何锁。 | lock-X(Q) |
锁能否授予取决于已有锁和请求锁是否兼容。
| 已持有 \ 请求 | S | X |
|---|---|---|
| S | 兼容 | 不兼容 |
| X | 不兼容 | 不兼容 |
如果请求的锁与已有锁不兼容,事务必须等待,直到不兼容锁被释放。锁协议的目标不是简单地阻止并发,而是限制可能出现的调度集合,使这些调度满足可串行化或更强的恢复性质。
1.2 两阶段锁
只在读写前加锁、读写后立即释放锁,并不能保证可串行化。例如事务读完 \(A\) 后释放 \(A\) 的锁,再去读 \(B\);在两次读取之间,另一个事务可能更新 \(A\) 和 \(B\),导致前后读到的数据不属于同一个一致状态。
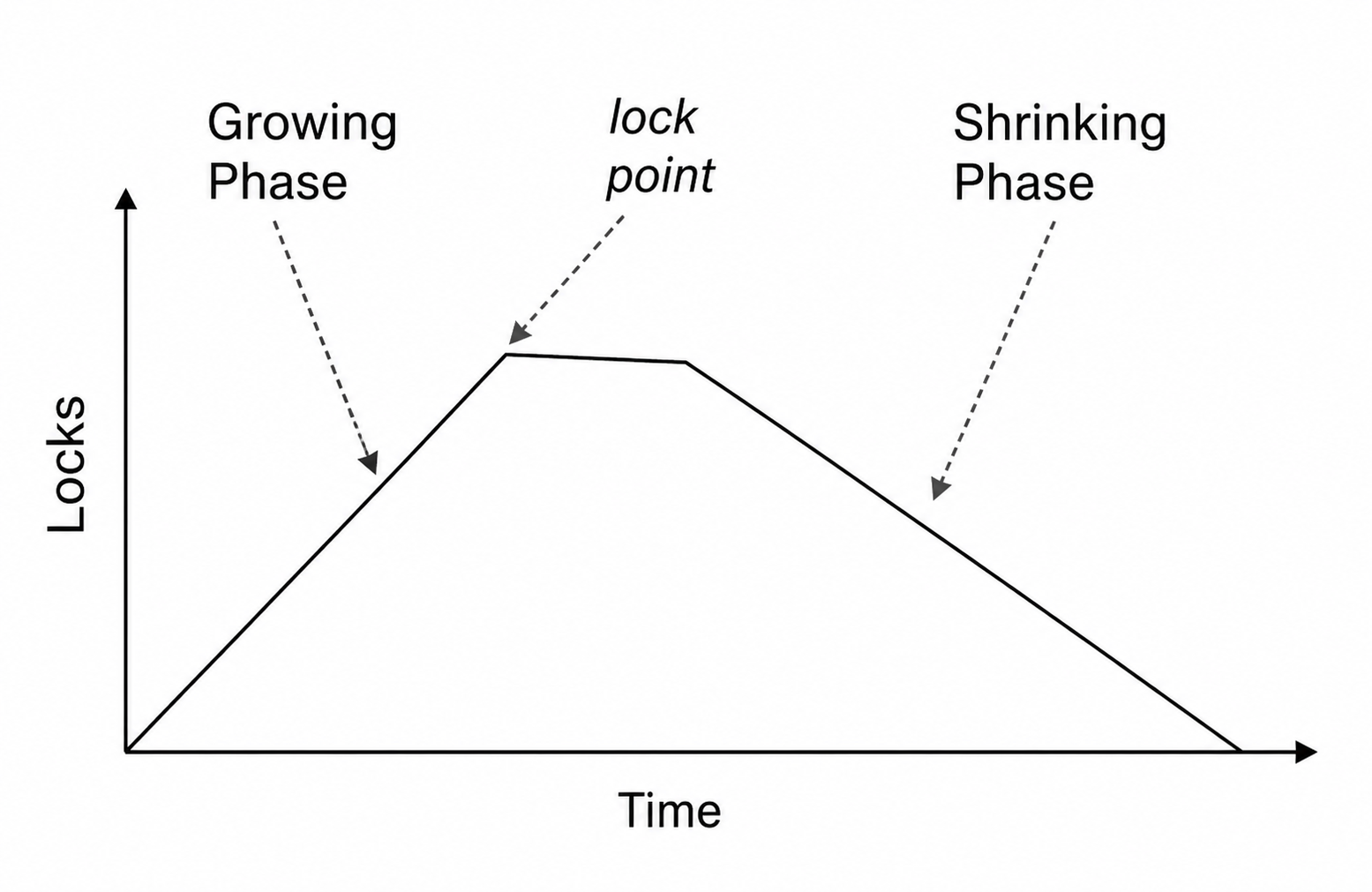
两阶段封锁协议 (Two-Phase Locking, 2PL) 要求每个事务的锁操作分为两个阶段:
| 阶段 | 允许操作 | 禁止操作 |
|---|---|---|
| 增长阶段 (Growing Phase) | 可以申请锁。 | 不能释放锁。 |
| 收缩阶段 (Shrinking Phase) | 可以释放锁。 | 不能再申请锁。 |
事务获得最后一个锁的时刻称为 锁点 (Lock Point)。2PL 保证冲突可串行化,并且等价的串行顺序可以按事务锁点排序。
2PL 的直觉是:如果 \(T_i\) 和 \(T_j\) 在某个数据项上发生冲突,并且冲突顺序要求 \(T_i\) 在 \(T_j\) 之前,那么 \(T_i\) 必须先获得相关锁并释放后,\(T_j\) 才能继续获得不兼容锁。因此在前驱图中若有边 \(T_i \to T_j\),通常可以推出 \(LP(T_i) < LP(T_j)\)。所有边都沿锁点递增方向,就不会形成环。
Note
2PL 是保证冲突可串行化的充分条件,不是必要条件。有些冲突可串行化调度无法由 2PL 产生,因为 2PL 对加锁和解锁顺序施加了额外约束。
1.3 严格变体
基本 2PL 保证冲突可串行化,但不一定保证可恢复和无级联。为了和恢复机制配合,常见系统会使用更强的变体。
| 变体 | 规则 | 效果 |
|---|---|---|
| 基本两阶段锁 (Basic 2PL) | 释放第一个锁后不能再获得新锁。 | 保证冲突可串行化。 |
| 严格两阶段锁 (Strict 2PL) | 所有排他锁一直持有到 commit 或 abort。 | 保证可恢复,并避免级联回滚。 |
| 强两阶段锁 (Rigorous 2PL) | 所有共享锁和排他锁都持有到 commit 或 abort。 | 事务可以按提交顺序串行化。 |
许多数据库实际实现的是严格或强两阶段锁,但文档中可能仍简称为 2PL。严格性带来的代价是锁持有时间更长,等待更容易发生;收益是恢复逻辑更简单,其他事务不会读取尚未提交的写入结果。
1.4 锁转换
在实际事务中,读后再写很常见。若事务已经持有 \(S\) 锁,后来需要修改同一数据项,可以把 \(S\) 锁升级为 \(X\) 锁,这称为 锁升级 (Lock Upgrade)。相反,把 \(X\) 锁降为 \(S\) 锁称为 锁降级 (Lock Downgrade)。
带锁转换的 2PL 通常要求:
- 增长阶段可以获得 \(S\) 锁或 \(X\) 锁,也可以把 \(S\) 锁升级为 \(X\) 锁。
- 收缩阶段可以释放锁,也可以把 \(X\) 锁降级为 \(S\) 锁。
- 一旦进入收缩阶段,就不能再升级或获得新锁。
这样仍可保证可串行化,因为决定冲突顺序的关键仍是事务最后一次获得足够强锁的时刻。
1.5 锁管理器
事务不一定显式写出 lock-S、lock-X。系统可以在执行 read(Q) 与 write(Q) 时自动申请锁:
- 执行
read(Q)时,如果事务已有合适的锁,直接读取;否则等待没有其他事务持有 \(X\) 锁后授予 \(S\) 锁。 - 执行
write(Q)时,如果事务已有 \(X\) 锁,直接写入;若只有 \(S\) 锁,则尝试升级;若没有锁,则等待所有不兼容锁释放后授予 \(X\) 锁。
锁管理器 (Lock Manager) 通常维护一张锁表。锁表以数据项名称为索引,记录已经授予的锁和等待队列。新的锁请求加入对应数据项的等待队列;释放锁时,系统删除相应请求并检查队列中后续请求是否可以被授予。为了高效释放某个事务持有的全部锁,系统也会维护“事务到锁集合”的反向列表。
锁表可以看成以内存哈希表实现的队列结构:每个数据项对应一个队列,队列中既有已经授予的锁,也有正在等待的请求。读锁表时,要先区分 已授予锁 和 等待请求,再把等待关系转成等待图。
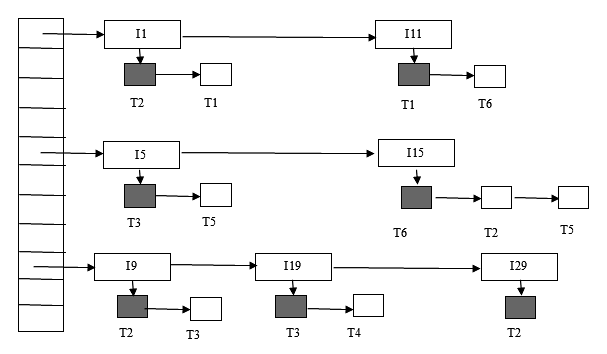
上图中,实心方块表示已经授予的锁,空心方块表示等待中的锁请求。判断死锁时,对每个等待请求画一条边,方向从等待事务指向当前阻塞它的事务。
例如 \(T_1\) 在 \(I_1\) 上等待 \(T_2\)。
\(T_2\) 在 \(I_{15}\) 上等待 \(T_6\)。
\(T_6\) 在 \(I_{11}\) 上等待 \(T_1\)。
因此等待图中出现环 \(T_1\to T_2\to T_6\to T_1\),这三个事务卷入死锁。若只按持有锁数量粗略估计回滚代价,\(T_1\) 或 \(T_6\) 比 \(T_2\) 更适合作为牺牲者;实际系统还会考虑事务已执行工作量、释放后能解除多少等待、以及该事务此前被回滚过多少次。
2. 死锁处理
2.1 死锁与饥饿
锁协议可能导致 死锁 (Deadlock)。如果存在一组事务,其中每个事务都在等待组内另一个事务释放锁,那么这组事务都无法继续执行。例如 \(T_1\) 已经写 \(X\),接下来等待写 \(Y\);\(T_2\) 已经写 \(Y\),接下来等待写 \(X\),二者就可能互相等待。
饥饿 (Starvation) 是另一个问题:某个事务一直得不到所需资源,例如它等待 \(X\) 锁时,系统不断授予其他事务对同一数据项的 \(S\) 锁;或者它在死锁处理中总是被选为回滚对象。并发控制管理器需要在公平性和吞吐量之间做设计。
2.2 死锁预防
死锁预防 (Deadlock Prevention) 的思路是在系统进入死锁之前就限制事务行为。
| 方法 | 做法 | 代价 |
|---|---|---|
| 预声明 | 事务开始前一次性申请所有数据项的锁。 | 降低并发度,事务也可能难以提前知道所有访问项。 |
| 数据项排序 | 给数据项规定偏序,事务只能按顺序申请锁。 | 需要设计合适顺序,访问灵活性下降。 |
| 超时 | 事务等待超过一定时间后回滚。 | 简单,但超时时间难设,可能误伤长等待事务。 |
| 时间戳策略 | 根据事务新旧决定等待或回滚。 | 可避免死锁,并能减少长期饥饿。 |
基于时间戳的预防策略有两种经典形式:
| 策略 | 规则 | 类型 |
|---|---|---|
| 等待-死亡 (Wait-Die) | 老事务可以等待新事务;新事务请求老事务持有的锁时回滚。 | 非抢占式 |
| 伤害-等待 (Wound-Wait) | 老事务请求新事务持有的锁时,强制新事务回滚;新事务可以等待老事务。 | 抢占式 |
回滚后事务通常保留原时间戳重新开始,因此它会逐渐变成“老事务”,从而降低饥饿风险。
2.3 检测恢复
死锁检测 (Deadlock Detection) 使用 等待图 (Wait-For Graph)。图中顶点是事务;若 \(T_i\) 正在等待 \(T_j\) 释放某个数据项,就加入边 \(T_i \to T_j\)。系统处于死锁状态,当且仅当等待图中存在环。
检测到死锁后,系统需要选择一个或多个事务作为 牺牲者 (Victim) 回滚,以打破环。选择时通常考虑:
- 已经执行了多少工作,回滚代价有多大。
- 事务持有多少锁,释放后能解除多少等待。
- 事务之前被回滚过多少次,避免同一事务反复成为牺牲者。
回滚可以是完全回滚,也可以只回滚到足以打破死锁的位置。后者代价更低,但需要系统有更精细的日志和恢复能力。
2.4 图协议
基于图的协议 (Graph-Based Protocols) 是 2PL 之外的另一类锁协议。系统为所有数据项规定一个偏序,例如 \(d_i \to d_j\) 表示访问两者的事务必须先访问 \(d_i\) 再访问 \(d_j\)。这类协议可以把数据项看成一个有向无环图。
树协议 (Tree Protocol) 是一种简单图协议:
- 只允许排他锁。
- 事务第一次加锁可以在任意数据项上。
- 之后事务只能锁住当前已持有锁节点的子节点。
- 数据项可以随时解锁。
- 某事务已经锁住并释放过的数据项,不能再次被该事务加锁。
树协议保证冲突可串行化,并且无死锁。它允许比 2PL 更早释放某些锁,因此可能减少等待;但它不保证可恢复和无级联,而且事务可能为了到达目标节点而锁住本来不需要的数据项。
3. 粒度幻影
3.1 多粒度锁
多粒度锁 (Multiple Granularity Locking) 允许数据项具有不同大小,例如数据库、区域、文件或表、记录。层次越低,粒度越细;层次越高,粒度越粗。
| 粒度 | 优点 | 缺点 |
|---|---|---|
| 细粒度 | 并发度高,不同事务更容易访问不同记录。 | 锁数量多,锁管理开销高。 |
| 粗粒度 | 锁数量少,管理成本低。 | 并发度低,容易阻塞无关操作。 |
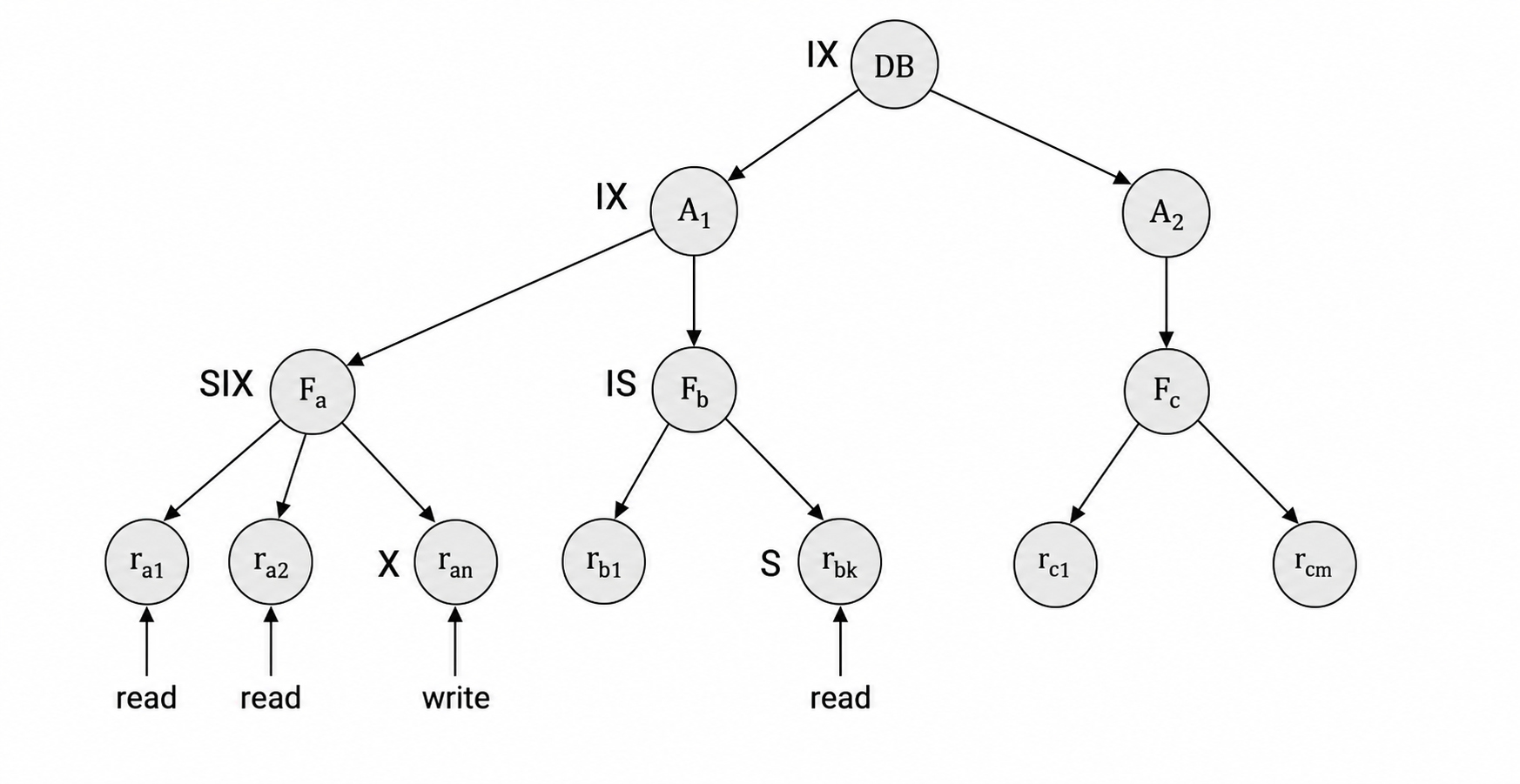
当事务显式锁住层次树中的某个节点时,它会隐式锁住该节点的所有后代。例如锁住一张表,就不必再逐行申请记录锁。但为了让系统判断“某个高层节点是否能被整体加锁”,需要引入意向锁。
3.2 意向锁
多粒度锁在 \(S\)、\(X\) 之外增加三种模式:
| 锁模式 | 含义 |
|---|---|
| 意向共享锁 (Intention Shared, IS) | 表示事务将在更低层节点申请共享锁。 |
| 意向排他锁 (Intention Exclusive, IX) | 表示事务将在更低层节点申请共享锁或排他锁。 |
| 共享意向排他锁 (Shared and Intention Exclusive, SIX) | 当前节点以共享方式锁住,同时还会在更低层节点申请排他锁。 |
完整兼容矩阵如下。
| 已持有 \ 请求 | IS | IX | S | SIX | X |
|---|---|---|---|---|---|
| IS | 兼容 | 兼容 | 兼容 | 兼容 | 不兼容 |
| IX | 兼容 | 兼容 | 不兼容 | 不兼容 | 不兼容 |
| S | 兼容 | 不兼容 | 兼容 | 不兼容 | 不兼容 |
| SIX | 兼容 | 不兼容 | 不兼容 | 不兼容 | 不兼容 |
| X | 不兼容 | 不兼容 | 不兼容 | 不兼容 | 不兼容 |
多粒度锁的申请顺序是从根到叶,释放顺序是从叶到根。事务必须先锁根节点;若要在某节点上申请 \(S\) 或 IS,父节点必须已经持有 IX 或 IS;若要申请 \(X\)、SIX 或 IX,父节点必须已经持有 IX 或 SIX。事务仍需满足两阶段规则,释放过节点后不能再申请新锁。
如果事务在某一层持有太多细粒度锁,系统可能进行 锁粒度升级 (Lock Escalation),把大量低层锁替换成更高层的 \(S\) 或 \(X\) 锁。这样可以减少锁表压力,但也会降低并发度。
3.3 插入删除
在 2PL 下,删除元组前需要获得该元组的 \(X\) 锁;插入新元组时,新元组也会被加 \(X\) 锁。但只锁已有元组并不能解决 幻影现象 (Phantom Phenomenon)。
幻影问题的本质是谓词范围冲突。例如一个事务扫描 Perryridge 分行所有账户并求和,另一个事务插入一个新的 Perryridge 账户。二者可能没有访问同一个已有元组,但它们都影响了“哪些元组属于这个查询结果”的信息。如果只对已有记录加锁,扫描事务可能看不到新插入记录,从而产生不可串行化调度。
一种粗略办法是为关系额外设置一个代表“元组集合信息”的数据项。扫描事务在该数据项上申请 \(S\) 锁,插入或删除事务申请 \(X\) 锁。这能阻止幻影,但并发度很低,因为所有插入和范围扫描都会互相冲突。
3.4 索引加锁
索引加锁 (Index Locking) 用索引叶节点捕捉谓词范围冲突。基本规则包括:
- 每个关系至少有一个索引。
- 事务访问元组前必须通过某个索引找到它们。
- 查找时,事务对访问到的索引叶节点申请 \(S\) 锁,即使该叶节点中没有满足条件的元组。
- 插入、更新或删除元组时,事务必须更新相关索引,并对受影响的索引叶节点申请 \(X\) 锁。
- 这些锁仍然遵守 2PL。
下一键锁 (Next-Key Locking) 进一步缩小锁范围。范围查询不仅锁住满足条件的键值,还锁住下一个键值,从而让并发插入、删除或更新与范围查询发生冲突。它比锁整个叶节点更细,有助于提高插入并发度。
索引结构本身也有特殊性。索引的主要作用是帮助定位数据,内部节点会被频繁访问。若对 B+ 树内部节点严格使用普通 2PL,会严重降低并发。实际索引并发协议常允许较早释放内部节点锁,只要保证最终能到达正确叶节点,并维护索引结构的一致性。
4. 多版本
4.1 MVCC 思想
多版本并发控制 (Multiversion Concurrency Control, MVCC) 通过保留数据项的旧版本来提高并发。每次成功写入都会创建一个新版本,版本用时间戳标记;当事务执行 \(\text{read}(Q)\) 时,系统根据事务时间戳选择合适版本返回。
可以把版本序列写成:
\[ \text{Q}: \langle \text{Q}_1, 1 \rangle,\ \langle \text{Q}_2, 2 \rangle,\ \langle \text{Q}_3, 3 \rangle \]读事务通常不需要等待写事务,因为它可以读取某个已经提交的旧版本。这显著提升了读多写少场景的并发能力,但代价是需要额外存储版本信息,并定期清理不再可能被任何活跃事务读取的旧版本。
4.2 多版本 2PL
多版本两阶段锁 (Multiversion Two-Phase Locking) 区分只读事务和更新事务。
| 事务类型 | 处理方式 |
|---|---|
| 只读事务 | 开始时读取当前 ts-counter 作为时间戳;读取 \(Q\) 时返回时间戳不超过自身时间戳的最新版本。 |
| 更新事务 | 使用严格 2PL 获取读写锁;写入时创建新版本,新版本时间戳先记为无穷;提交时统一设置为 ts-counter + 1。 |
更新事务提交时,会把自己创建的版本时间戳改为新的提交时间戳,然后递增 ts-counter 并释放锁。提交之后启动的只读事务能看到这些新版本;提交之前启动的只读事务仍看到旧版本。因此只读事务可以获得稳定视图,而更新事务仍通过锁保证冲突顺序。
4.3 快照隔离
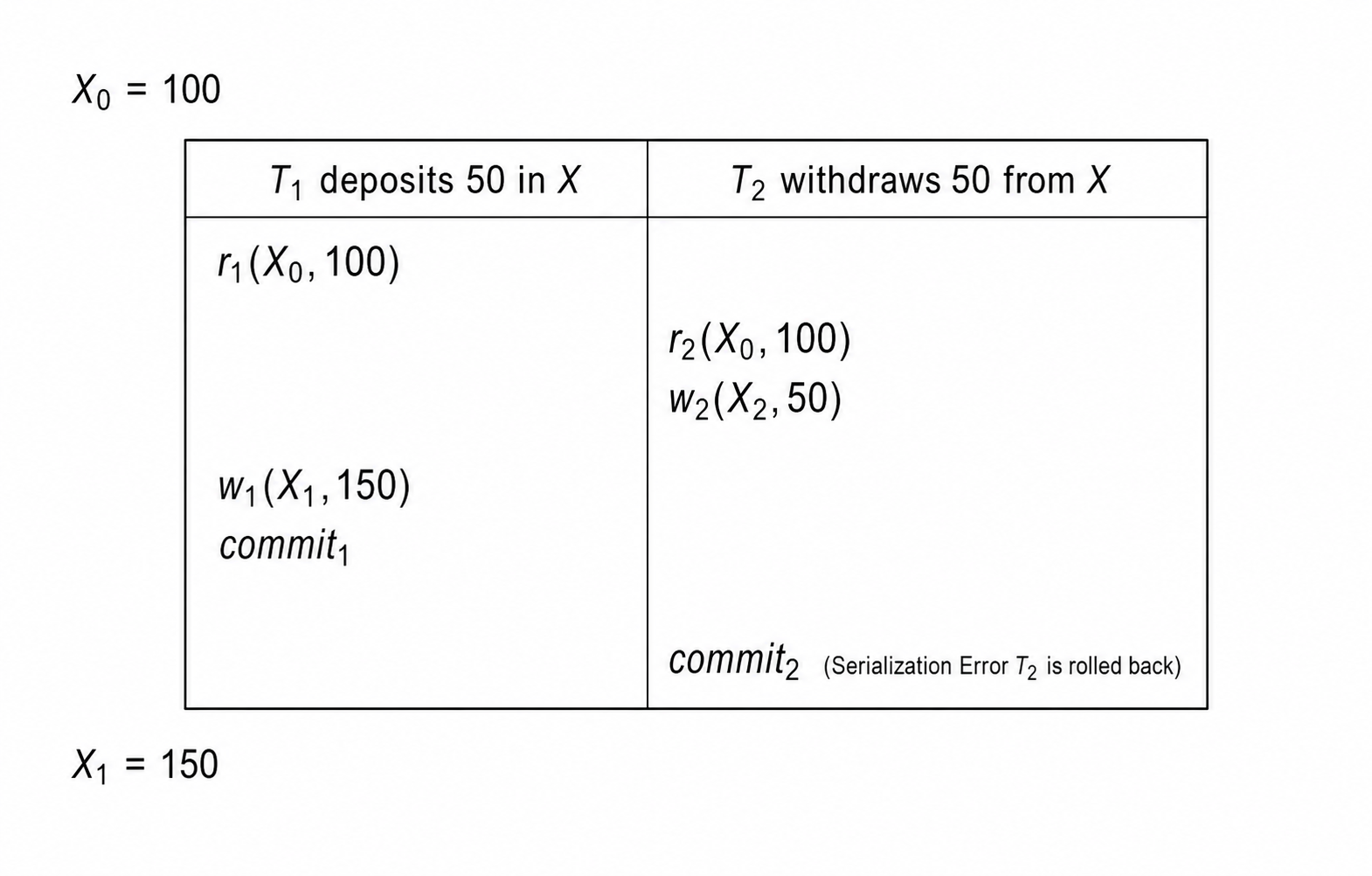
快照隔离 (Snapshot Isolation, SI) 给每个事务一个开始时刻的已提交数据快照。事务读取和修改自己的快照;并发事务的更新对它不可见;它自己的写入在事务内部可见,并在提交时对外生效。
快照隔离通常使用 先提交者获胜 (First-Committer-Wins) 规则:若某事务提交时发现另一个并发事务已经写过它也想写的数据项,则该事务不能提交。
SI 的优点很明显:读操作不会被写操作阻塞,也不会阻塞写操作;它通常能避免脏读、丢失修改、不可重复读和普通幻影问题,性能接近 Read Committed。但 SI 不等同于真正的可串行化,因为两个并发事务可能都基于同一旧快照做决策,且修改不同数据项,从而绕过写写冲突检测。
4.4 写偏斜
SI 的典型异常是 写偏斜 (Write Skew)。假设初始 \(x = 3\)、\(y = 17\),事务 \(T_1\) 执行 \(x := y\),事务 \(T_2\) 执行 \(y := x\)。串行执行时,最终结果必然体现其中一个事务看到了另一个事务的写入;但如果两个事务在同一快照上并发执行,可能得到 \(x = 17\)、\(y = 3\),二者都没有看到对方的更新。
插入场景也会发生类似问题。例如两个事务都读取当前最大订单号,然后各自插入 max + 1 的新订单。如果没有共同更新的冲突数据项,仅靠快照可能无法阻止不一致。应用在使用 SI 时,需要特别检查跨多行、多表的完整性约束是否依赖可串行化。
4.5 弱一致性
实际系统还会提供弱一致性级别。二级一致性 (Degree-Two Consistency) 允许共享锁随时释放,也允许随时重新获得共享锁,但排他锁必须持有到事务结束。游标稳定性 (Cursor Stability) 是它的特例:读取每个元组时加锁,读完立即释放;排他锁仍持有到事务结束。
SQL 中常见隔离级别可以和这些思想对应起来:
| 隔离级别 | 行为 |
|---|---|
Serializable | 要求可串行化。 |
Repeatable Read | 重复读取同一已提交记录应返回相同值,但不一定阻止幻影。 |
Read Committed | 只能读已提交记录,许多系统用游标稳定性或 MVCC 实现。 |
Read Uncommitted | 允许读取未提交数据。 |
很多数据库默认不是 Serializable,需要在确有强一致性要求时显式设置。
5. 时间戳验证
5.1 时间戳排序
时间戳排序协议 (Timestamp-Ordering Protocol) 在事务进入系统时分配时间戳。若 \(T_i\) 比 \(T_j\) 更早进入系统,则 \(TS(T_i) < TS(T_j)\)。协议强制所有冲突读写都按照时间戳顺序执行,因此时间戳决定等价串行顺序。
每个数据项 \(Q\) 维护两个时间戳:
| 时间戳 | 含义 |
|---|---|
W-timestamp(Q) | 成功执行 write(Q) 的最大事务时间戳。 |
R-timestamp(Q) | 成功执行 read(Q) 的最大事务时间戳。 |
读规则如下:
| 操作 | 条件 | 结果 |
|---|---|---|
| \(\text{read}(Q)\) | \(TS(T_i) \leq W\text{-timestamp}(Q)\) | \(T_i\) 需要读的旧值已经被覆盖,回滚 \(T_i\) |
| \(\text{read}(Q)\) | \(TS(T_i) > W\text{-timestamp}(Q)\) | 允许读取,并更新 \(R\text{-timestamp}(Q)\) |
写规则如下:
| 操作 | 条件 | 结果 |
|---|---|---|
| \(\text{write}(Q)\) | \(TS(T_i) < R\text{-timestamp}(Q)\) | \(T_i\) 写出的版本本应被某个更晚读操作看到,但该读已经发生,回滚 \(T_i\) |
| \(\text{write}(Q)\) | \(TS(T_i) < W\text{-timestamp}(Q)\) | \(T_i\) 试图写入过时版本,回滚 \(T_i\) |
| \(\text{write}(Q)\) | 其他情况 | 执行写入,并设置 \(W\text{-timestamp}(Q) = TS(T_i)\) |
时间戳排序不会产生死锁,因为事务不会等待锁;冲突不满足顺序时直接回滚。但它可能不是无级联的,甚至可能不是可恢复的,因为事务可能读取另一个尚未提交事务写出的值。
5.2 可恢复性
为了解决时间戳排序的恢复问题,可以使用几种方法:
- 让事务把所有写操作推迟到执行末尾,并把这些写作为原子动作执行。
- 事务中止后用新的时间戳重新开始。
- 使用有限锁机制,让事务等待读取的数据先提交。
- 使用提交依赖,确保读依赖关系中的提交顺序满足可恢复性。
这些方法本质上是在“无等待、无死锁”的优点之外,额外补上提交顺序和读取可见性的约束。
5.3 Thomas 规则
Thomas 写规则 (Thomas’ Write Rule) 是时间戳排序的一种修改。普通时间戳排序中,如果 \(TS(T_i) < W\text{-timestamp}(Q)\),事务 \(T_i\) 试图写入过时值,会被回滚。Thomas 写规则认为这种过时写入可以直接忽略,而不必回滚整个事务。
它能产生更多并发,因为某些不会影响最终视图的旧写入不再造成事务失败。代价是它允许一些视图可串行化但非冲突可串行化的调度,因此正确性依据从冲突可串行化放宽到视图可串行化。
5.4 验证协议
基于验证的协议 (Validation-Based Protocol) 也称 乐观并发控制 (Optimistic Concurrency Control)。它假设冲突概率较低,让事务先执行,提交前再验证是否可以安全写回。
每个事务按三个阶段执行:
| 阶段 | 行为 |
|---|---|
| 读和执行阶段 | 读取数据库,写入只保存在本地临时变量。 |
| 验证阶段 | 检查把本地结果写回是否会破坏可串行化。 |
| 写阶段 | 验证成功则写回数据库,失败则回滚。 |
事务 \(T_i\) 有三个时间点:\(Start(T_i)\)、\(Validation(T_i)\)、\(Finish(T_i)\)。串行化顺序由验证时间决定,即 \(TS(T_i) = Validation(T_i)\)。
对于要验证的事务 \(T_j\),所有更早验证的事务 \(T_i\) 必须满足以下条件之一:
\[ \text{Finish}(T_i) < \text{Start}(T_j) \]或
\[ \text{Start}(T_j) < \text{Finish}(T_i) < \text{Validation}(T_j) \]并且 \(T_i\) 的写集合与 \(T_j\) 的读集合不相交。第一种情况表示二者没有重叠执行;第二种情况允许重叠,但要求较早事务的写入没有影响较晚事务已经读过的数据。
验证协议适合冲突率低的场景。它避免了长时间持锁,也不会预先固定串行化顺序;但如果冲突频繁,事务可能在接近提交时才失败,浪费较多已经完成的工作。
5.5 用户交互
许多应用需要跨用户交互维持并发控制,例如用户打开页面、阅读数据、稍后提交修改。此时不适合长期持有数据库锁,也不应为每个用户长期占用数据库连接。
常见做法是在应用层使用版本号。读取元组时同时读取版本:
select r.balance, r.version
from r
where acctId = 23;更新时检查当前版本是否仍等于读取时的版本:
update r
set r.balance = r.balance + :deposit
where acctId = 23
and r.version = :version;若更新影响行数为 0,说明数据已经被其他事务修改,应用可以提示用户重试。这相当于一种简化的乐观并发控制,只验证被写元组的版本,而不保证所有读取都来自同一个快照。